
TO robot je elektromechanický stroj ktorý je riadený obvodom alebo počítačovým programom. Roboty si vymenili ľudí za účelom vykonávania nepretržitých a nebezpečných úloh, ktoré sa ľudia rozhodnú nerobiť. Prítomný roboty sú klasifikované do rôznych kategórií na základe ich funkcií a výkonu, ako sú priemyselné roboty, komerčné roboty, servisné roboty, mobilné roboty. Tu je servisný robot, ktorý vykonáva nepretržité úlohy na privítanie ľudí pohybom ruky predstavujúcim „Namaste“ prostredníctvom zaznamenanej hlasovej správy. Všeobecne platí, že keď pozývame ľudí domov, na večierky, na sobášne miesta, do kancelárie atď. Musíme zariadiť, aby ich človek pozdravil, a pozvať ich ku vchodu. Ak je počet ľudí nízky, potom je úloha jednoduchšia. Ale ak pozdravíte stovky ľudí, potom je úloha ťažká. Na prekonanie tohto problému je tu projekt, a to namaste robot s hlasovým ovládaním.

Namaste Robot
Namaste Robot s hlasovým ovládaním
Hlavná koncepcia tohto Namaste robotickým projektom je riadenie rôznych servomotorov cez dosku Arduino. Tento robot skenuje okolitých ľudí a otáča hlavou okolo o 180 °. Ak rozpozná niekoho v blízkosti, želá si, aby osoba s Namaste bola stlačená obidvoma rukami. Je to tradičný spôsob priania ľudí v Indii. The aplikácie robotov zapojiť do nákupných centier, parkov, kancelárií prilákať ľudí.
Bloková schéma robota Namastae s hlasovým ovládaním
Nasledujúci obrázok označuje blokovú schému robota Namaste s hlasovým ovládaním. U tohto druhu robotov sa programujú hlasové povely. Celú vývojovú dosku je možné pripojiť k spoločnému napájaciemu zdroju. Popis každého bloku je nasledovný. The Zdroj dáva napájanie všetkým modulom. Tieto moduly vyžadujú prúd v mA a prevádzkové napätie bude 5V.

Bloková schéma robota Namastae s hlasovým ovládaním
Doska Arduino
Arduino je jeden druh nástroja založené na jednoduchej doske mikrokontroléra používanej na ovládanie a vnímanie fyzického sveta ako stolný počítač. Pre fyzické výpočty sú k dispozícii rôzne platformy mikrokontrolérov. Dôležitými vlastnosťami Arduina sú lacný, otvorený a rozšíriteľný softvér. Softvér Arduino je k dispozícii ako nástroj s otvoreným zdrojom a jazyk je možné rozšíriť prostredníctvom knižníc C ++.

Doska Arduino
Senzor Ping
Pingový senzor pomocou SONARU riadi vzdialenosť objektu v jeho blízkosti. Toto snímač sa používa ako oči robota, aby snímali prekážku. Napríklad snímač vzdialenosti. Poskytuje vynikajúcu presnosť rozsahu a stabilné hodnoty. Na činnosť tohto snímača nemá vplyv čierny materiál ani slnečné svetlo. Špecifikácie senzora ping sú napätie 5 V, prúd 15 mA, uhol senzora NIE> = 15 a detekčná vzdialenosť 2 cm ~ 450 cm.

Senzor Ping
Prepojenie senzora ping s Arduino je uvedené nižšie. K dispozícii sú štyri piny na prepojenie pingového senzora s doskou Arduino. Štyri piny na doske Arduino sú GND, VCC, ECHO a TRIGGER. Kolíky na doske sú D0-D13, v tom, že 12 a 13 kolíkov sú vstupné a výstupné kolíky.
Mikrokontrolér Arduino nám ponúka knižnicu riadenia servomotorov, ktorá nám umožňuje ľahké prepínanie serv. V tomto projekte sme pomocou 5 serva regulovali pohyby robota Namaste ako hlava, pravé lakeť, ľavé lakeť, pravé rameno a ľavé rameno. Tu digitálne vstupné / výstupné piny (D5, D6, D9, D10, D1) piny znamenajú v doske Arduino prepojené so servomotormi.
Hlasové prehrávanie IC
Toto IC na prehrávanie hlasu ponúka zaznamenanú správu, ktorá sa prehráva s preddefinovanou frekvenciou. Prehrávanie sa presunie do zosilňovacej jednotky zvuku.

Hlasové prehrávanie IC
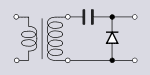
Relé
TO relé je jeden druh spínača pracuje elektricky. Prietok prúdu cievkou relé vytvára magnetické pole, ktoré vyvoláva páku a mení spínacie kontakty.

Relé
Robot Namastae s hlasovým ovládaním pracuje
Prácu robota Namaste je možné vykonať postupnými krokmi spolu so simulovanými výsledkami. Keď je robot Namaste v prvom stave, potom servomotor s robota 2, 3, 4, 5 sú v stave VYPNUTÉ alebo nulové. Hlava robota Namaste sa strieda od stredu doprava, doľava a potom späť do stredu kvôli pretočeniu servomotora1 z 0 ° - 180 °. Pohyb hlavy robota určuje, že robot Namaste hľadá prekážku. Keď snímač ping zistí akúkoľvek prekážku, poloha hlavy robota sa vráti do stredu a Servo motor1 sa relikvie pod uhlom 90 ° vypne. Aktivuje sa v NÍZKOM stave.
Keď sa servomotor 1 vypne, zostávajúce motory ako servo4 a servo5 sa zapnú. Signálne vedenie sa spúšťa pre pravé a ľavé rameno robota Namaste. Teraz môžu ruky robota pohybovať nahor. Ramenné servomotory sú prepojené s digitálnymi vstupnými a výstupnými kolíkmi dosky Arduino. Ale signálne vedenia alebo tieto kolíky budú vysoké a poloha serva sa zmení na 90 °. Teraz sa servo4 a servo 5 vypnú.
Nakoniec môžeme dospieť k záveru, že hlavným cieľom tohto hlasového ovládania službu má poskytovať robot zdvorilo vítať ľudí odhaľovaním ľudí, ktorí idú pred ním. Môže byť použitý na rôznych verejných miestach, ako sú parky, nákupné centrá, večierky atď. Dúfame, že ste tomuto konceptu lepšie porozumeli. Ďalej akékoľvek otázky týkajúce sa tohto konceptu alebo založeného na arduine robotické projekty , prosím, poskytnite svoje cenné návrhy komentárom v sekcii komentárov nižšie.
Fotografické úvery:
- Doska Arduino nyacknewsandviews
- Senzor Ping paralaxa
- Hlasové prehrávanie IC kealab
- Relé awdirect
- Namaste Robot canstockphoto






{kind=link}
{kind=link}
{kind=link}
{kind=link}