V tejto ére priemyselná automatizácia , sa používajú roboty na riadenie rôznych procesov na presnú a lepšiu kvalitu výroby. Výber ideálneho motora pre dokonalého robota je vždy náročná úloha pri navrhovaní robota najmä pre priemyselné odvetvia. Správny výber elektrické motory v priemyselných robotoch vyžaduje niekoľko parametrov, ktoré berú do úvahy riadenie paže, polohu, uhlové a lineárne pohyby.

Motory používané v priemyselnej robotike
Výber motorov je najmenej chápaný koncept pre robotických nadšencov, ktorí si vyžadujú strategické a dôkladné analýzy. Zahŕňa stanovenie rýchlosti, akcelerácie, krútiaceho momentu robota na základe hmotnosti robota, veľkosti kolesa a aplikácie, kde má byť implementovaný. Existuje veľa druhov motorov. sú dostupné na dnešnom trhu, ale väčšinou sú to motory s malými pagermi, servomotory , lineárne motory, krokové motory a jednosmerné prevodové motory sa používajú v priemyselných robotoch podľa oblasti ich použitia.
Nesprávny výber motora končí u postihnutého robota, tak aký typ motora je najlepší a vhodný na to, aby boli priemyselné roboty skutočné, presné a dostatočné na to, aby vyhoveli všetkým potrebám priemyselných procesov pri súčasnom zohľadnení všetkých realistických špecifikácií?
Tu sme zhromaždili niekoľko poznatkov o týchto motoroch od priemyselných odborníkov, aby sme vybrali vhodný motor, ktorý bude vybraný pre priemyselné aplikácie.
Odporúčame vám riadiť sa názormi odborníkov, ktorých cieľom je poskytnúť najlepšie motory pre priemyselnú robotiku s dostupnými jednosmernými, krokovými, bezkartáčovými a servomotormi na presné, nákladovo efektívne a spoľahlivé pohyby robota.
Ch.Sampath Kumar
M.tech v dizajne VLSI
Zapisovateľ technického obsahu
 Jednosmerné motory sú pre nepretržitú prevádzku k dispozícii v širokom rozsahu, vyžaduje však redukcie prevodovky vhodné pre príslušné použitie. Krokový motor nevyžaduje žiadne zníženie prevodového stupňa, pretože jeho stupňovitá prevádzka poskytuje pri určených aplikáciách nízku rýchlosť. Nakoniec sa servomotory používajú na presné a presné riadenie, ktoré sa realizuje v operáciách s uzavretým obvodom. Vyžaduje to však ďalšiu spätnú väzbu a budiace obvody, takže je to drahé ako jednosmerný prúd a krokový motor. Vďaka servomotorom je robot vďaka svojmu presnému pohybu spoľahlivejší.
Jednosmerné motory sú pre nepretržitú prevádzku k dispozícii v širokom rozsahu, vyžaduje však redukcie prevodovky vhodné pre príslušné použitie. Krokový motor nevyžaduje žiadne zníženie prevodového stupňa, pretože jeho stupňovitá prevádzka poskytuje pri určených aplikáciách nízku rýchlosť. Nakoniec sa servomotory používajú na presné a presné riadenie, ktoré sa realizuje v operáciách s uzavretým obvodom. Vyžaduje to však ďalšiu spätnú väzbu a budiace obvody, takže je to drahé ako jednosmerný prúd a krokový motor. Vďaka servomotorom je robot vďaka svojmu presnému pohybu spoľahlivejší.
Viswanath Prathap
M. Tech v elektroenergetike
Zapisovateľ technického obsahu

Pick and place Roboty sa zvyčajne nachádzajú v priemyselných odvetviach na vyberanie predmetov z jednej polohy alebo miesta a na iné miesto alebo miesto. Z tohto dôvodu je potrebné riadiť uhlové pohyby kĺbov robotov, čo sa dá dosiahnuť pomocou servomotorov. Tieto servomotory sú riadené pomocou údajov PWM poskytovaných robotickým radičom na ovládanie kĺbov robotov. Servomotory sú schopné generovať dostatočný krútiaci moment na rýchly presun objektu zo zastavenej polohy. Tieto sa teda používajú ako kolesá vo vojenských a priemyselných robotických vozidlách. Na riadenie polohy sa môžu použiť aj krokové motory, ktoré však budú spotrebovávať energiu aj v kľudovom období iba na uzamknutie a udržanie prikázanej polohy. Servomotory sa teda zvyčajne používajú v priemyselnej robotike ako vysoko výkonná náhrada krokových motorov.
S. Naresh Reddy
M.tech v zabudovanom systéme
Sprievodca projektom
Štruktúra mechanického robota musí byť kontrolovaná dokonale  rm úloha. Existujú tri rôzne fázy na ovládanie robota, ako sú vnímanie, spracovanie a činnosť. Senzory poskytujú robotovi informácie o polohe jeho kĺbov a koncovom efektore. Tieto informácie sa potom spracujú do riadiacej jednotky a vypočítajú vhodný signál pre motor, ktorý sa pohybuje mechanicky. Prevažná väčšina robotov používa elektromotory. V prenosných robotoch sa opakovane používajú jednosmerné a jednosmerné motory a v priemyselných robotoch sa používajú jednosmerné motory. Tieto motory sú preferované v systémoch s ľahším zaťažením a tam, kde je prevládajúcou formou pohybu rotácia.
rm úloha. Existujú tri rôzne fázy na ovládanie robota, ako sú vnímanie, spracovanie a činnosť. Senzory poskytujú robotovi informácie o polohe jeho kĺbov a koncovom efektore. Tieto informácie sa potom spracujú do riadiacej jednotky a vypočítajú vhodný signál pre motor, ktorý sa pohybuje mechanicky. Prevažná väčšina robotov používa elektromotory. V prenosných robotoch sa opakovane používajú jednosmerné a jednosmerné motory a v priemyselných robotoch sa používajú jednosmerné motory. Tieto motory sú preferované v systémoch s ľahším zaťažením a tam, kde je prevládajúcou formou pohybu rotácia.
Suresh Megaji
M. Tech v bezdrôtových komunikačných systémoch
Zapisovateľ technického obsahu

Ak sa chcete zapojiť do „robotiky“ a ich uplatnenia v „priemysle“, mali by ste vedieť o „motoroch“, ktoré sa používajú v robotike, pretože robotika je väčšinou závislá od motorov. „Robotické stroje“ sa v zásade používajú na rôzne aplikácie vo výrobe. Rôzne „motory“ ako D.C., impulzné, krokové, optické pohony, motory s čiastočným otáčaním a s Hallovým efektom atď. Sa používajú s niektorými technikami na ich uplatnenie v priemysle a na dosiahnutie ich priateľskej podoby, ako napríklad
- Motory s jednosmerným prúdom sa používajú na aplikácie orientované na batériu, nižšiu rýchlosť a mobilné aplikácie.
- Všade, kde potrebujeme aplikáciu zameranú na rotáciu, môžeme použiť krokové motory, ako sú unipolárne a bipolárne motory.
- Na pohyby hlavy a paží môžeme použiť motory s čiastočným otočením.
- Ak chceme použiť magnetické polia, môžeme použiť motory s Hallovým efektom a optické pohony atď.
Použitím robotiky, ktorá využíva inteligentné motory, môžeme ušetriť peniaze, čas, priestor, nebezpečné pohyby atď.
Ajay Sahare
Marketingový manažér

Priemyselné roboty sa používajú v prostredí priemyselnej výroby. Jedná sa o ramená špeciálne vyvinuté pre také aplikácie ako zváranie, manipulácia s materiálom, lakovanie a ďalšie.
Nie každé mechatronické zariadenie používané v priemyselnom prostredí možno považovať za robota. Ako je definované v ISO (Medzinárodná organizácia pre normalizáciu), automaticky ovládaný, preprogramovateľný, viacúčelový manipulátor programovateľný v troch alebo viacerých osiach sa považuje za priemyselného robota.
Motory používané v priemyselnej robotike sú
- Motory na striedavý prúd (AC)
- Motory na jednosmerný prúd (DC)
- Servomotory
- Krokové motory.
1. Trojfázové motory možno ďalej rozdeliť na asynchrónne a synchrónne typy. Napríklad indukčný striedavý motor je jednotka asynchrónneho typu, ktorá v zásade pozostáva z drôtovo vinutého statora a rotora. Napájanie je pripojené k drôtu a striedavý prúd, ktorý ním preteká, indukuje elektromagnetické (EM) pole v stočenom drôte s dostatočne silným poľom poskytujúcim silu pre pohyb rotora. Synchrónne motory sú motory s konštantnými otáčkami, ktoré pracujú synchronne s frekvenciou striedavého vedenia a bežne sa používajú tam, kde sa vyžadujú presné konštantné otáčky.
2. Mnoho priemyselných aplikácií vrátane robotiky využíva jednosmerné motory často kvôli ľahkej kontrole rýchlosti a smeru. Sú schopné nekonečného rozsahu otáčok, od plnej rýchlosti po nulu, so širokým rozsahom zaťaženia.
Pretože jednosmerné motory majú vysoký pomer krútiaceho momentu k zotrvačnosti, môžu rýchlo reagovať na zmeny v riadiacich signáloch. Jednosmerný motor možno plynulo ovládať na nulový pohyb a okamžite akcelerovať v opačnom smere bez potreby zložitých obvodov na prepínanie výkonu. Bezkartáčové jednosmerné motory s permanentným magnetom sú zvyčajne nákladnejšie ako typy kefiek, aj keď môžu poskytnúť výhody v oblasti spotreby energie a spoľahlivosti.
Bez komutátora môžu bezkartáčové motory pracovať efektívnejšie a pri vyšších rýchlostiach ako bežné jednosmerné motory. Väčšina jednosmerných jednosmerných motorov pracuje na lichobežníkovom striedavom priebehu, ale niektoré z nich pracujú so sínusovými vlnami. Bezkartáčové motory poháňané sínusovým vedením môžu dosiahnuť plynulý chod pri nízkych otáčkach s nízkym zvlnením krútiaceho momentu, čo ich robí ideálnymi na brúsenie, natieranie a ďalšie aplikácie, ako sú povrchové úpravy.
Ak chcete, aby sa v prípade brúsených jednosmerných motorov váš motor točil pomalšie bez straty energie, môžete použiť pulznú šírkovú moduláciu (PWM). To v podstate znamená veľmi rýchle zapnutie a vypnutie motora. Týmto spôsobom sa motor otáča s nižšou rýchlosťou, ako keby bolo aplikované nižšie napätie bez starostlivosti o výkon.
Krútiaci moment generovaný kartáčovaným jednosmerným motorom je v zásade príliš malý a rýchlosť príliš veľká na to, aby bola užitočná. Redukcia prevodov sa teda zvyčajne používa na zníženie rýchlosti a zvýšenie krútiaceho momentu.
3. Servomotory sa používajú v uzavretých systémoch s digitálnym regulátorom. Ovládač odosiela príkazy rýchlosti do zosilňovača budiča, ktorý následne napája servomotor. Určitá forma spätnoväzbového zariadenia, napríklad rezolver alebo kódovač, poskytuje informácie o polohe a rýchlosti servomotora. Rezolver alebo kódovač môžu byť integrované do motora alebo umiestnené na diaľku. Vďaka systému uzavretej slučky môže servomotor pracovať so špecifickým pohybovým profilom, ktorý je naprogramovaný do ovládača.
4. Krokové motory môžu pracovať so spätnou väzbou alebo bez nej, pričom rotácia motora je rozdelená na malé uhlové kroky. Je riadený impulznými povelovými signálmi a môže sa zastaviť presne v povelenom bode bez potreby bŕzd alebo spojkových zostáv. Po odpojení napájania zostáva krokový motor s permanentným magnetom spravidla v poslednej polohe. Viaceré krokové motory je možné udržiavať synchronizovane riadením z spoločného zdroja.
Dev desai
Marketingový manažér 
Ak sa plánujete zapojiť do robotiky, budete sa musieť oboznámiť s mnohými dostupnými typmi motorov. Celý robotický pohyb je motorizovaný tak či onak, takže je dôležité vedieť, aké sú vaše možnosti.
Jednosmerné motory
Okrem toho, že je jednosmerný motor poháňaný batériou, určuje sa jeho polarita. To je pre robotické funkcie absolútna nevyhnutnosť. Našťastie má tento typ motora širokú škálu veľkostí, požiadaviek na napätie a je k dispozícii všade.
Rôzne typy motorov sú uvedené nižšie
- Základný motor mobility
- Vysokorýchlostný hobby motor
- Remeňový pohonný motor
- Slot auto motor
- Pulzne ovládané
- Motor prispôsobený ramenám
- Bipolárny steper s ukazovateľom
Bio Motor
Biokov je úžasná látka, ktorá existuje už niekoľko rokov a má množstvo aplikácií v oblasti robotiky. Na ilustrácii vidíme, že kus biokovového drôtu sa zmenší o päť percent svojej dĺžky, keď je na neho aplikovaných iba niekoľko voltov. Po rokoch testovania sa ukázalo, že biologický drôt je silný, spoľahlivý a s pribúdajúcimi novými produktmi sa stáva čoraz užitočnejším. Jeho trochu pomalší čas odozvy ho robí ideálnym pre robotické aplikácie rúk a rúk, kde by trhanie bolo problematické. Dlhý kus drôtu môže spôsobiť výrazný pohyb, keď sa natiahne po celej dĺžke robotického ramena. V súčasnosti sú na komerčnom trhu súpravy robotických ramien, ktoré používajú biokov.
Relé
Relé sa v robotike takmer vždy používa na izoláciu výkonu určeného pre motory od zdroja napájania pre funkciu počítača. Motory kvôli svojej nízkej impedancii kladú vysoké nároky na napájanie a vytvárajú viac závad, ktoré počítače nemôžu tolerovať. Preto je dobré použiť samostatný zdroj vysokého prúdu iba pre motory.
Solenoidy
Solenoidy sa najlepšie používajú ako ovládacie zariadenia manipulátorov alebo prepínače. Ich pohyb je rýchly a silný, takže v uchopovačoch sa takmer vždy používa pružina na zmiernenie akcie. Ako vidíte na ilustrácii, ovládacie vodiče sa používajú na uzavretie chápadla. Tieto riadiace vodiče môžu pôsobiť aj ako vratné pružiny. Takéto nástroje na uchopenie sa nachádzajú skôr vo výrobných linkách, kde je úloha veľmi meraná a pokrýva úzke parametre.
Sekundárne funkcie
Väčšina motorických funkcií zahŕňa pohyblivosť, ruku, hlavu alebo iný viditeľný vonkajší pohyb, niektoré pohyby však nie sú také viditeľné. Veľké priemyselné roboty používajú hydraulické systémy, ktoré používajú motory čerpadiel na výrobu prevádzkového tlaku hydraulickej kvapaliny. Ďalšou dôležitou sekundárnou funkciou motorov je regulované nastavenie. Na zvýšenie presnosti sú potenciometre prepojené s motormi zvyčajne viacotáčkové zariadenia.
Záver
Roboty môžu byť veľmi zložité zariadenia vyžadujúce širokú škálu pohybov poháňaných motorom. Tento článok má poskytnúť prehľad o rozsahu zariadení, s ktorými sa ako staviteľ robotov môžete stretnúť. Bolo by dobré začať výskumom dodávateľov robotického vybavenia a dostupného spotrebného materiálu. V súčasnosti je k dispozícii obrovské množstvo produktov a internet umožňuje ľahké vyhľadanie, získanie informácií a použitie. Nech sú vaše potreby akékoľvek, trocha vynaliezavosti a odhodlania, ktoré sa zdá, že majú všetci stavitelia robotov, by vám mali slúžiť dobre.
Samadan Wandre
Marketingový manažér
„Motory používané v robotike“
- Základný motor mobility

- Vysokorýchlostný hobby motor
- Remeňový pohonný motor
- Slot auto motor
- Pulzne ovládané
- Motor prispôsobený ramenám
- Bipolárny steper s ukazovateľom

Väčšie motory sú najvhodnejšie pre základne mobility, ktoré umožňujú robotom manévrovať s terénom. Niektoré z týchto motorov sú vybavené prevodovkami, ktoré zaisťujú nižšiu rýchlosť a krútiaci moment potrebný pre mobilitu. Zníženie napätia na motor môže tiež spomaliť na požadovanú rýchlosť. Iba experimentovanie môže určiť, či bude váš motor pracovať s nižším napätím. Ak to urobí, ušetrila si veľa problémov, ak nie, existujú aj iné spôsoby spomalenia motorov. Niektoré vysokorýchlostné motory je možné použiť, ak sa používajú závitovkové alebo závitovkové prevody.
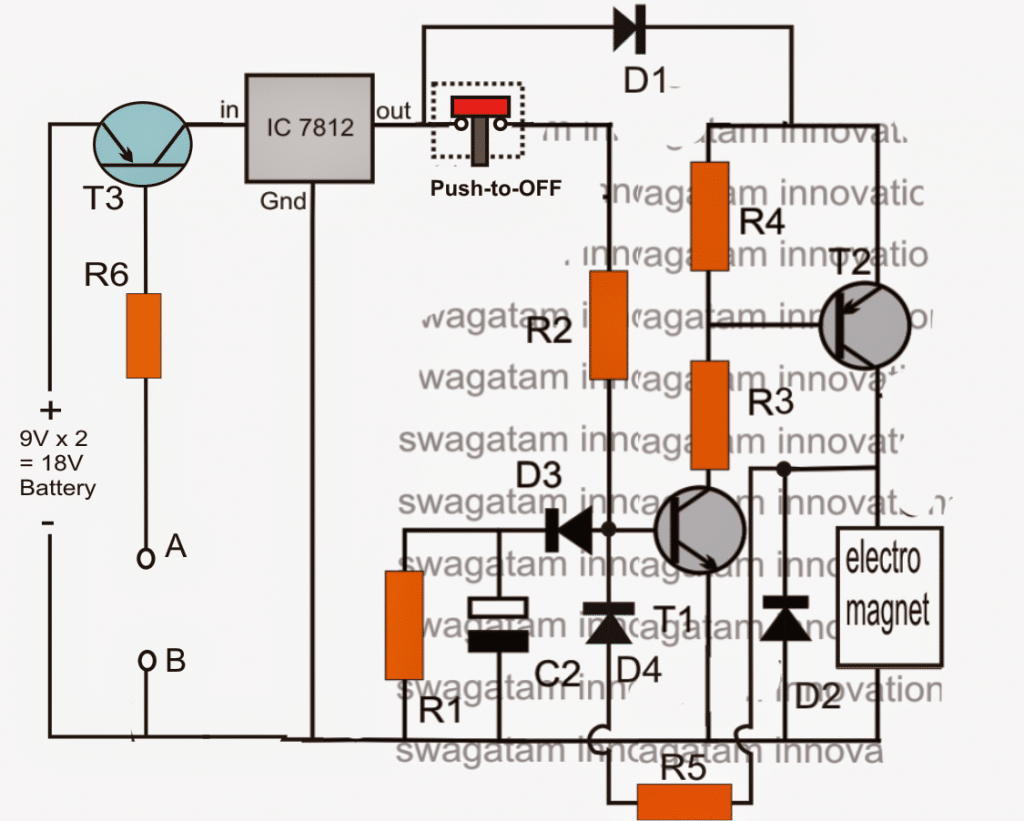
Príklad skrutkového prevodu je možné vidieť na ilustrácii robotického ramena. Keď sa motor otáča v smere hodinových ručičiek, skrutková zostava sa priťahuje k motoru a rameno sa stiahne, a keď sa otočí proti smeru hodinových ručičiek, rameno sa vysunie. Aj keď sa hriadeľ motora rýchlo točí, pôsobenie ramena je z dôvodu redukcie skrutky podstatne pomalšie. Na tomto nasledujúcom obrázku obvodu motora vidíme jednosmerný motor riadený výkonovým tranzistorom. Smerový spínač určuje spínač (Double Pole Double Throw). Tranzistor Q1 by mal byť výkonový tranzistor, ktorý unesie veľké zaťaženie motora.
Pulzné motory
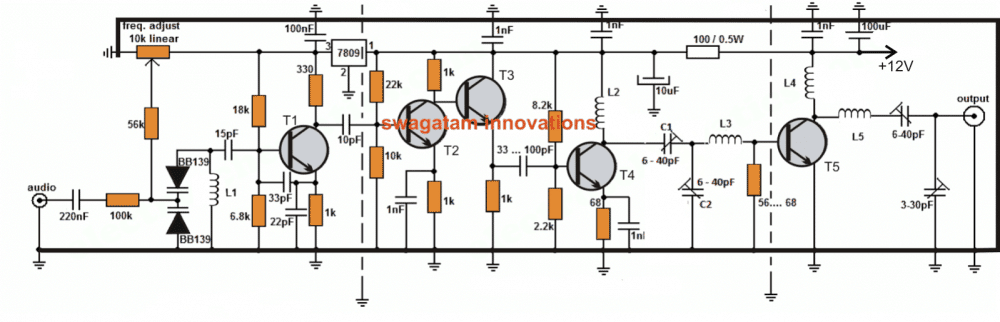
Niektoré motory odvodzujú zníženie otáčok pomocou impulzného jednosmerného signálu. Tento signál je zvyčajne okolo sto Hz. Otáčky motora je možné meniť zmenou šírky impulzu, nie zmenou frekvencie impulzu. Takéto motory nájdete v obchodoch s prebytočnou elektronikou a ľahko ich spoznáte podľa pripojeného generátora impulzov. Akýkoľvek jednosmerný motor môže byť napájaný zdrojom impulzov a je v ňom zahrnutá aj schéma takéhoto obvodu.
Ako vidíte, ako pohonný oscilátor bol zvolený časovač 555, ktorý produkuje frekvenciu približne 100 Hz. Rezistor R1 a kondenzátor C stabilizujú a izolujú generátor impulzov od hrotov vytváraných motorom. Pretože toto zariadenie môže čerpať z napájacieho zdroja 6 až 12 voltov, možno budete chcieť zmeniť hodnotu kondenzátora C4 a C6, aby ste dosiahli lepšie výsledky, v závislosti od toho, aké napätie používate. Impulzný výstup sa berie z kolíka tri IC1 a privádza sa na kolík dva IC2, tiež časovača 555.
Druhý časovač mení šírku impulzu nastavením napätia, ktoré sa privádza do kondenzátora C6 potenciometrom R5 a odporom R6. Trvanie impulzu určuje rýchlosť motora a šírku impulzu je možné nastaviť od 10% do 100%.
Tranzistor Q1 prijíma modulovaný signál šírky impulzu cez rezistor R7. Pretože Q1 je slaboprúdové zariadenie, prenáša signál na Q2, výkonový tranzistor, ktorý dokáže zvládnuť prúdové požiadavky motora. Tieto tranzistory nie sú kritické a bude fungovať takmer akýkoľvek typ nízkonapäťového výkonového tranzistora. Relé určí, akým smerom sa bude motor uberať.
Krokové motory
Najkomplexnejším zo všetkých motorov je krokový motor. Rovnako ako odvodzovanie názvu, motor sa otáča v stupňových prírastkoch a je ovládaný pulzne. Presný stupeň otočenia na krok sa môže líšiť od jedného výrobcu alebo modelu k druhému, ale 20 stupňov je populárny a pri jednom úplnom otočení vyprodukuje 18 krokov. Existujú dva základné typy krokových motorov, bipolárne a unipolárne. Ako môžete vidieť na schéme krokového motora, bipolárny motor je jednoducho poháňaný dvoma cievkami.
Unipolárny typ sú dve cievky so stredovými kohútikmi. Ak sú stredové kohútiky ignorované, unipolárny motor môže pracovať ako bipolárny typ. Dve cievky v krokovom motore sú napájané krokovými impulzmi striedavo s polaritou z cievky na cievku. Mapa tohto procesu je uvedená v pracovnom diagrame na grafické znázornenie činnosti motora. Na rozdiel od bežných jednosmerných motorov krútiaci moment klesá s rýchlosťou. Na posunutie krokového motora je tiež potrebný špeciálny typ pohonnej jednotky, ktorá by sa mala dodávať s motorom. Neodporúča sa stavať riadiacu jednotku, pokiaľ motor nie je dodávaný s dobrým technickým listom, ktorý obsahuje odporúčania komponentov a úplnú schému.
Na izoláciu motora od pohonného systému môže motor vyžadovať vyrovnávaciu pamäť alebo môže byť potrebné samostatné napájanie. Bez ohľadu na potreby sa môžu u jednotlivých motorov značne líšiť. Hobby obchody sú najspoľahlivejším dodávateľom krokových motorov, a hoci ich môžu mať nadbytočné elektronické obchody, nemusia obsahovať potrebné technické údaje.
Čiastočné otočné motory
Niektoré robotické funkcie vyžadujú iba čiastočné otočenie, napríklad pohyby hlavy alebo paží. Najjednoduchšie to dosiahnete pomocou polohových zarážok a šmykových prevodov. Vyššie je uvedená ilustrácia mechanických detailov tohto typu motora. Mikrospínače možno použiť ako snímače zastavenia na vypnutie napájania a reset smeru pre ďalšiu akciu.
Spodné koleso je spojené s motorom, zatiaľ čo horné koleso je od spodného kolesa oddelené kruhovým kusom plsti. Keď sa spodné koleso točí, horné sa s ním otáča, až kým sa dorazový čap nedotkne mikrospínača. Niektoré konštrukcie neobsahujú opatrenia na zastavenie motora, takže ako dorazy motora budú fungovať jednoduché skrutky s rozperami.
Biomotor
Biokov je úžasná látka, ktorá existuje už niekoľko rokov a má množstvo aplikácií v oblasti robotiky. Na ilustrácii vidíme, že kus biokovového drôtu sa zmenší o päť percent svojej dĺžky, keď je na neho aplikovaných iba niekoľko voltov. Po rokoch testovania sa ukázalo, že biologický drôt je silný, spoľahlivý a s pribúdajúcimi novými produktmi sa stáva čoraz užitočnejším. Jeho trochu pomalší čas odozvy ho robí ideálnym pre robotické aplikácie rúk a rúk, kde by trhanie bolo problematické. Dlhý kus drôtu môže spôsobiť výrazný pohyb, keď sa natiahne po celej dĺžke robotického ramena. V súčasnosti sú na komerčnom trhu súpravy robotických ramien, ktoré používajú biokov.
Bhaskar Singh
Marketingový manažér
 Priemyselné roboty sú zariadenia, ktoré do istej miery duplikujú ľudský pohyb spolu so znižovaním nebezpečenstva a poskytujú väčšiu silu, presnosť a kontinuitu. Potrebujú širokú škálu pohybov poháňaných motorom v závislosti od ich prevádzkových režimov, ovládania, použitých nástrojov a vykonanej práce. Priemyselný robotický motor by mal mať potenciál zvládnuť širokú škálu povinností ako bežné motory, aby sa mohol špecializovať na konkrétnu úlohu.
Priemyselné roboty sú zariadenia, ktoré do istej miery duplikujú ľudský pohyb spolu so znižovaním nebezpečenstva a poskytujú väčšiu silu, presnosť a kontinuitu. Potrebujú širokú škálu pohybov poháňaných motorom v závislosti od ich prevádzkových režimov, ovládania, použitých nástrojov a vykonanej práce. Priemyselný robotický motor by mal mať potenciál zvládnuť širokú škálu povinností ako bežné motory, aby sa mohol špecializovať na konkrétnu úlohu.
Elektromotory sa v priemyselnej robotike najbežnejšie používajú vďaka vysoko efektívnemu získavaniu energie a relatívne jednoduchému projektovaniu, vďaka čomu sú populárnejšími riešeniami z hľadiska pomeru ceny a výkonu vo všetkých aspektoch - inštalácia, údržba a servis.
V závislosti na potrebnej práci sa používajú rôzne motory na rôzne účely. Napríklad jednosmerné motory sa používajú na pohyby v smere hodinových ručičiek a proti smeru hodinových ručičiek, príklady sú v žeriavoch a kladkostrojoch, impulzné motory sa používajú na zabezpečenie impulzných pohybov pomocou šírky jednosmerného impulzu, motory s čiastočným otáčaním sa používajú na zabezpečenie pohybov hlavy a ramien a najkomplexnejšie z nich - krokové motory sa používajú na zabezpečenie stupňovitých otáčok v krokoch po stupňoch.
Okrem toho sa v závislosti od typu práce používajú motory s rôznymi výkonmi a veľkosťami na rôzne účely. Existuje niekoľko typov motorov, z ktorých každý má rôzne aplikácie na rôznych miestach v závislosti od práce a konštrukcie robota.
Mohan Krišna. Ľ
Vedúci predaja a podpory
Roboty sa používajú na prácu, ktorú môžu robiť ľudia. Existuje veľa dôvodov, prečo sú roboti lepší ako ľudia. 
Existujú dva hlavné typy robotov, ktorými sú: -
Mobilný robot: To sa pohybuje po nohách alebo stopách.
Stacionárny robot: To má pevný základ.
Stacionárne roboty Robotické ramená sa zvyčajne dajú použiť na zdvihnutie predmetov alebo vykonanie inej práce, ktorá spočíva v tom, že sa dostanete k nejakému predmetu.
Robotické rameno má tri základné časti: -
- Ramenný kĺb
- Kĺb zápästia
- Pevná základňa
Potrebujete robota pre
- Schopnosť rýchlo pracovať a nebezpečné prostredie.
- Schopnosť opakovať úlohy znova a znova.
- Schopnosť pracovať presne.
- Schopnosť robiť rôzne úlohy.
- Účinnosť.
Motor je zariadenie, ktoré premieňa elektrickú energiu na mechanickú, tj. Elektromechanické zariadenie. Existujú dva typy motorov, ako je striedavý motor a jednosmerný motor.
Motor používaný v priemyselnej robotike je servomotor. Servomotor je jednoduchý elektrický motor riadený pomocou servomechanizmu. Ak je riadený motor ovládaný striedavým prúdom, nazýva sa to AC servomotor, inak jednosmerný servomotor. Väčšina servomotorov sa môže otáčať asi o 90 až 180 stupňov. Dokonca sa niektoré otáčajú aj celých 360 stupňov alebo viac. Niektoré aplikácie servomotora v robotike sú
- Aplikácia servomotora v robotike, tj. Jednoduchý robot typu pick and place, slúži na výber objektu z jednej polohy a na umiestnenie objektu do inej polohy.
- Používa sa servomotor v dopravníkoch
- v priemyselných výrobných a montážnych jednotkách na odovzdanie predmetu z jednej montážnej stanice do druhej. Pre Ex: - Proces plnenia fľaše.
- Servomotor v robotickom vozidle, tu servomotor používaný v kolesách. Pretože sa používa servomotor s nepretržitou rotáciou.
Dinesh.P
Marketingový manažér
 Roboty majú byť predstavené tak, aby znižovali ľudskú prácu a pomáhali ľuďom vytvárať šťastie pre budúci vývoj. Pojem robot znamená stroj, ktorý napodobňuje rôzne ľudské vlastnosti. Robotika zahŕňa vedomosti z oblasti strojárstva, elektroniky, elektrotechniky a informatiky. Motory používané v robotoch sú jednosmerné motory, krokové motory a servomotory
Roboty majú byť predstavené tak, aby znižovali ľudskú prácu a pomáhali ľuďom vytvárať šťastie pre budúci vývoj. Pojem robot znamená stroj, ktorý napodobňuje rôzne ľudské vlastnosti. Robotika zahŕňa vedomosti z oblasti strojárstva, elektroniky, elektrotechniky a informatiky. Motory používané v robotoch sú jednosmerné motory, krokové motory a servomotory
Kde,
- Na nepretržitú rotáciu sa používajú jednosmerné motory
- Krokové motory sa používajú na otáčanie o niekoľko stupňov
- Servomotory sa používajú na určovanie polohy, môžu sa používať v automobiloch a lietadlách
Ganesh .J
Marketingový manažér 
Roboty sa používajú na prácu, ktorú môžu robiť ľudia, a tiež znižujú ľudské úsilie a čas a zvyšujú kvalitu. Motory používané v priemyselnej robotike sú
- Motory na striedavý prúd (AC)
- Motory na jednosmerný prúd (DC)
- Servomotory
- Krokové motory.