Krátky úvod do robota:
Robot je akýkoľvek stroj, ktorý je úplne automatický, to znamená, že sa spúšťa sám, rozhoduje o svojom spôsobe práce a sám sa zastaví. Je to vlastne replika ľudskej bytosti, ktorá bola navrhnutá na uľahčenie ľudskej záťaže. Môže byť ovládaný pneumaticky alebo hydraulicky alebo pomocou jednoduchých elektronických spôsobov ovládania. Prvým priemyselným robotom boli Unimates, ktorí postavili George Devol a Joe Engelberger koncom 50. a začiatkom 60. rokov.
Akýkoľvek robot je postavený na 3 základných zákonoch definovaných ruským autorom sci-fi Isaacom Asimovom:
- Robot by nemal človeku priamo alebo nepriamo ublížiť.
- Robot by sa mal riadiť ľudskými príkazmi, pokiaľ neporušuje prvý zákon.
- Robot by si mal chrániť svoju vlastnú existenciu za predpokladu, že nebudú porušené prvé dva zákony.

Fixný robot
Roboty môžu byť pevné alebo mobilné roboty. Mobilné roboty sú roboty s mobilnou základňou, vďaka ktorej sa robot môže voľne pohybovať v prostredí. Jedným z pokročilých mobilných robotov je robot Line Follower. Je to v podstate robot, ktorý sleduje konkrétnu cestu alebo trajektóriu a rozhoduje o svojom postupe, ktorý interaguje s prekážkou. Cesta môže byť čierna čiara na bielej podlahe (viditeľná) alebo magnetické pole (neviditeľné). Jeho aplikácie začínajú od základného domáceho použitia až po priemyselné použitie atď. Súčasným stavom v priemysle je preprava balíkov alebo materiálov z jedného miesta na druhé pomocou žeriavového systému. Niekedy môže zdvíhanie veľkých váh v tom čase spôsobiť rozbitie zdvíhacích materiálov a tiež poškodenie balíkov. Nasledujúce roboty sa bežne používajú na nosenie detí po nákupných centrách, domoch, zábavných miestach, priemysle. Použitie sledu liniek robotické vozidlo je preprava materiálov z jedného miesta na druhé v priemyselných odvetviach. Tento pohyb robota úplne závisí od stopy. Robot môže robiť čokoľvek, čo ste im nastavili. Rovnako ako v továrňach, všetko, čo musia robiť so svojimi výrobkami, je vyrábať robot.

Mobilný robot
Robot sledovača čiary
Robot riadiaci čiaru je robot, ktorý sleduje určitú cestu riadenú mechanizmom spätnej väzby.
Zostavenie základného robota sledovača liniek:
Zostavenie základného robota Line Follower zahŕňa nasledujúce kroky.
- Navrhovanie mechanickej časti alebo tela robota
- Definovanie kinematiky robotov
- Navrhovanie riadenia robota

Robot sledovača čiary
Mechanickú časť alebo telo robota je možné navrhnúť pomocou aplikácie AutoCAD alebo Workspace. Základný robot sledovača čiary môže pozostávať zo základne, na ktorej dvoch koncoch sú namontované kolesá. Ako základ môže byť použitá obdĺžniková doska z tvrdého plastu. Ďalej možno pridať tuhé teleso ako valec spolu s ďalšími tvarovanými telesami navzájom prepojenými kĺbmi a každé s jeho definovaným pohybom v konkrétnom smere. Robotom nasledovníka Line môže byť kolesový mobilný robot s pevnou základňou, nožný mobilný robot s viacerými tuhými telami navzájom prepojenými kĺbmi.
Ďalším krokom je definovanie kinematiky robota. Kinematická analýza robota zahŕňa opis jeho pohybu vzhľadom na pevný súradnicový systém. Týka sa hlavne pohybu robota a pohybu každého tela v prípade nožného robota. Spravidla to zahŕňa dynamiku pohybu robota. Celá trajektória robota je nastavená pomocou kinematickej analýzy. To je možné vykonať pomocou softvéru Workspace.
Ovládanie robota je najdôležitejším aspektom jeho práce. Pojem kontrola tu označuje riadenie pohybu robota, t. J. Riadenie pohybu kolies. Robot základného sledovača čiary ide po určitej dráhe a pohyb robota po tejto ceste je riadený riadením otáčania kolies, ktoré sú umiestnené na hriadeľoch dvoch motorov. Základné ovládanie sa teda dosahuje ovládaním motorov. Riadiace obvody zahŕňajú použitie senzorov na snímanie cesty a mikrokontrolér alebo akékoľvek iné zariadenie na riadenie činnosti motora prostredníctvom ovládačov motora na základe výstupu snímača.
2 spôsoby ovládania robota sledovača linky
- Bez použitia mikrokontrolérov

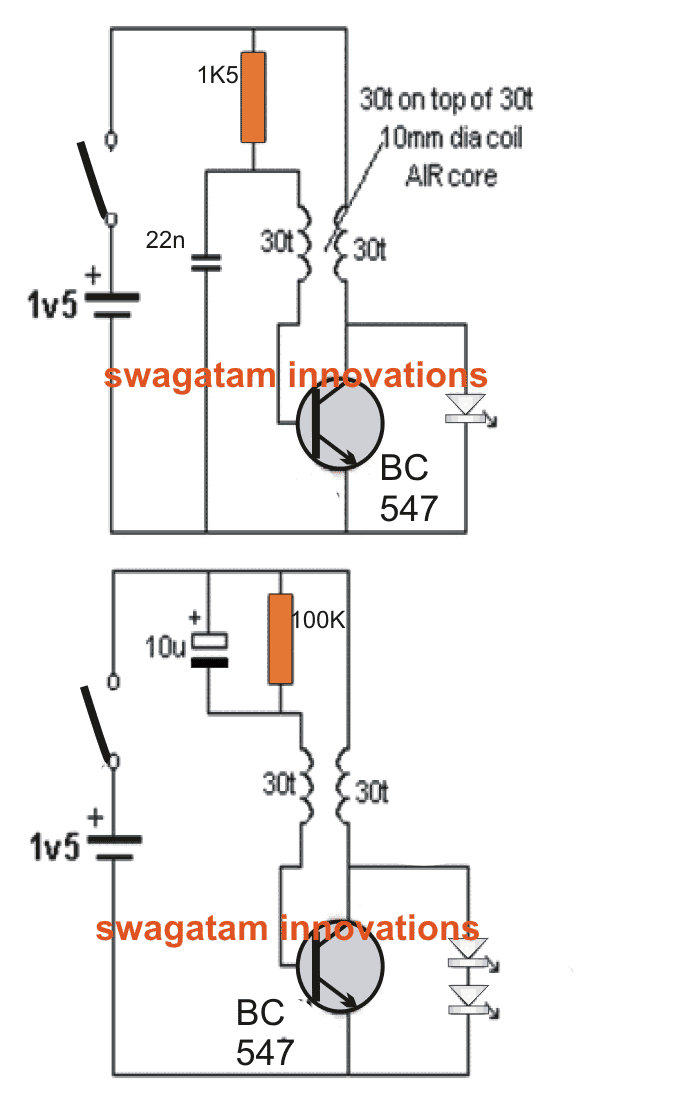
Bloková schéma riadiaceho systému
Skladá sa z usporiadania IR-LED a fotodiódy pre každý motor, ktoré sú riadené zapínaním a vypínaním tranzistora.
IR LED pri správnom predpätí vysiela infračervené svetlo. Toto infračervené svetlo sa odráža v prípade bieleho povrchu a odrazené infračervené svetlo dopadá na fotodiódu. Odpor fotodiódy klesá, čo vedie k zvýšeniu prúdu cez ňu a tým k poklesu napätia cez ňu. Fotodióda je pripojená k pätici tranzistora a v dôsledku zvýšeného napätia na fotodióde začne tranzistor vodiť, a teda motor pripojený k kolektoru tranzistora dostane dostatok napájania na to, aby sa začal otáčať. V prípade čiernej farby na ceste, na ktorú narazí jedno z usporiadaní snímačov, sa infračervené svetlo neodráža a fotodióda ponúka väčší odpor, čo spôsobí, že tranzistor zastaví vedenie a nakoniec sa zastaví motor.
Celý systém tak možno ovládať pomocou jednoduchého usporiadania LED-fotodióda-tranzistor.
- S využitím mikrokontrolérov
Pracovný princíp:
Robot ležiaci ladom je jedným zo samostatne pracujúcich robotov. To detekuje a ladí s líniou nakreslenou na ploche. Čiara je označená bielou čiarou na povrchu bloku alebo čiarou bloku na bielom povrchu. Tento systém musí mať zmysel po riadku. Táto aplikácia závisí od senzorov. Tu používame dva senzory na účely detekcie cesty. Teda senzor priblíženia a IR senzor. Bezdotykový senzor používaný na detekciu dráhy a IR senzor na detekciu prekážky. Tieto snímače boli namontované na prednom konci robota. Mikrokontrolér je inteligentné zariadenie, celý obvod je riadený mikrokontrolérom.

Bloková schéma robotického vozidla sledujúceho čiaru s mikrokontrolérom
Rôzne typy riadených robotických vozidiel:
Existujú dva typy riadených robotických vozidiel
- Mobilné lineárne riadené robotické vozidlo
- RF riadené robotické vozidlo
Aplikácie robota sledovača liniek:
- Priemyselné aplikácie : Tieto roboty sa dajú použiť ako automatizované nosiče vybavenia v priemysle, ktoré nahrádzajú tradičné dopravné pásy.
- Automobilové aplikácie : Tieto roboty je možné použiť aj ako automatické autá jazda po cestách so zabudovanými magnetmi.
- Domáce aplikácie : Môžu sa tiež použiť v domácnostiach na domáce účely, ako je čistenie podláh atď.
- Poradenské aplikácie : Môžu byť použité na verejných miestach, ako sú nákupné centrá, múzeá atď., Na zabezpečenie vedenia po trase.
Výhody:
- Pohyb robota je automatický
- Používa sa na aplikácie na veľké vzdialenosti
- Jednoduchosť stavby
- Systém Fit and forget
- Používa sa v domácnostiach, priemyselných automatizáciách atď.