Roboty môžu byť použité v mnohých aplikáciách v priemyselných, vojenských a domácich odvetviach. Jedno z hlavných použití robotov je výhodou pre ľudí. Či už sa jedná o akýkoľvek druh nebezpečných situácií, ako je požiar alebo miesto plné mín, Roboti môžu z týchto problémov ľahko nájsť východisko. Pozrime sa teda na tieto dva typy robotov - pozemnú baňu snímajúcu robota a hasiaceho robota
Robot na snímanie pozemných mín
Ako rozoznať pozemnú mínu pomocou robotov?
Jednou z najdôležitejších aplikácií robotiky je obrana. Vojenský robot je diaľkovo ovládané vozidlo s mnohými jedinečnými vlastnosťami. Môže to byť robotické vozidlo so špionážnou kamerou, robotické vozidlo s LASEROVOU pištoľou na detekciu a zničenie cieľov alebo robot s detektor kovov zistiť prítomnosť nášľapných mín.
Jedným z tradičných a konvenčných spôsobov detekcie mín je použitie trénovaných osôb, ktoré ručne vyhľadávajú kovy alebo míny pomocou detektora kovov. To však nie je bezpečné a drahé a tiež pomalé.
Na prekonanie tohto problému sa uprednostňuje oveľa pokročilejší systém.
Niekoľko spôsobov detekcie nášľapných mín:
- Pomocou robota, ktorý dokáže vložiť sondu do zeme, ktorá dokáže detekovať objekty pod pôdou a určiť typ materiálu.
- Používanie robota s detektorom kovov, ktorý dokáže vycítiť prítomnosť vodivých prvkov, ako sú pozemné míny, a upozorniť používateľa.
Predtým, ako sa pozrieme na ďalšie podrobnosti o druhom type - tj. Robotovi s detektorom kovov, pripomeňme si dva dôležité pojmy - pozemné míny a detektor kovov.
TO Pozemná mína je výbušné zariadenie umiestnené úmyselne pod zemou, ktoré pri tlaku vyvolá výbuch. Podľa štatistickej správy sa v 70 krajinách sveta nachádza asi 100 miliónov nášľapných mín. Raz umiestnená mína môže pracovať až 50 rokov. Nie je to nebezpečné !!

Základný detektor kovov funguje na princípe Faradayovho indukčného zákona. Skladá sa z cievky, ktorá je napájaná tak, aby okolo nej vyvíjala pulzujúce magnetické pole. Keď sa cievka dostane do blízkosti vodivého prvku, ako je kov (baňa), indukuje sa v nej elektrický prúd (vírivý prúd). Indukovaný vírivý prúd spôsobuje vývoj elektromagnetického poľa okolo kovu, ktoré sa znova prenáša na cievku, ktorá vyvíja elektrický signál, ktorý sa analyzuje. Čím väčšia je vzdialenosť medzi cievkou a kovom, tým slabšie je magnetické pole.
Jednoduchý prototyp:

Jednoduchý prototyp robotického vozidla s detektorom kovov
Návrh robota:
Robotické vozidlo sa skladá z nasledujúcich jednotiek:
- Obdĺžniková základňa na podporu celej konštrukcie robota, pripevnená dvoma kolieskami pre pohyb.
- Pár jednosmerných motorov, ktoré robotovi poskytujú požadovaný pohyb.
- Riadiaca jednotka pozostávajúca z RF prijímača, ktorý prijíma povelové signály z vysielacej jednotky na riadenie budiča motora a zodpovedajúce riadenie motorov.
- Okamžite po detekcii kovu sa spustí obvod detektora kovov spolu s bzučiakom.
Ako robot pracuje:
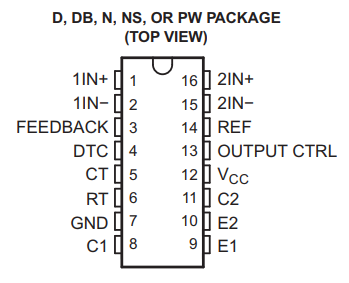
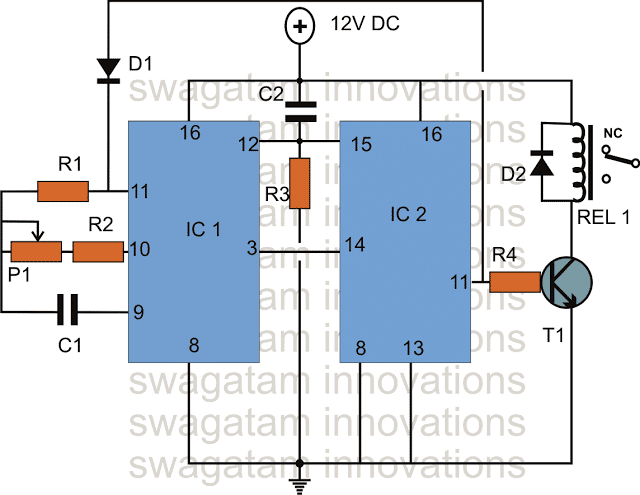
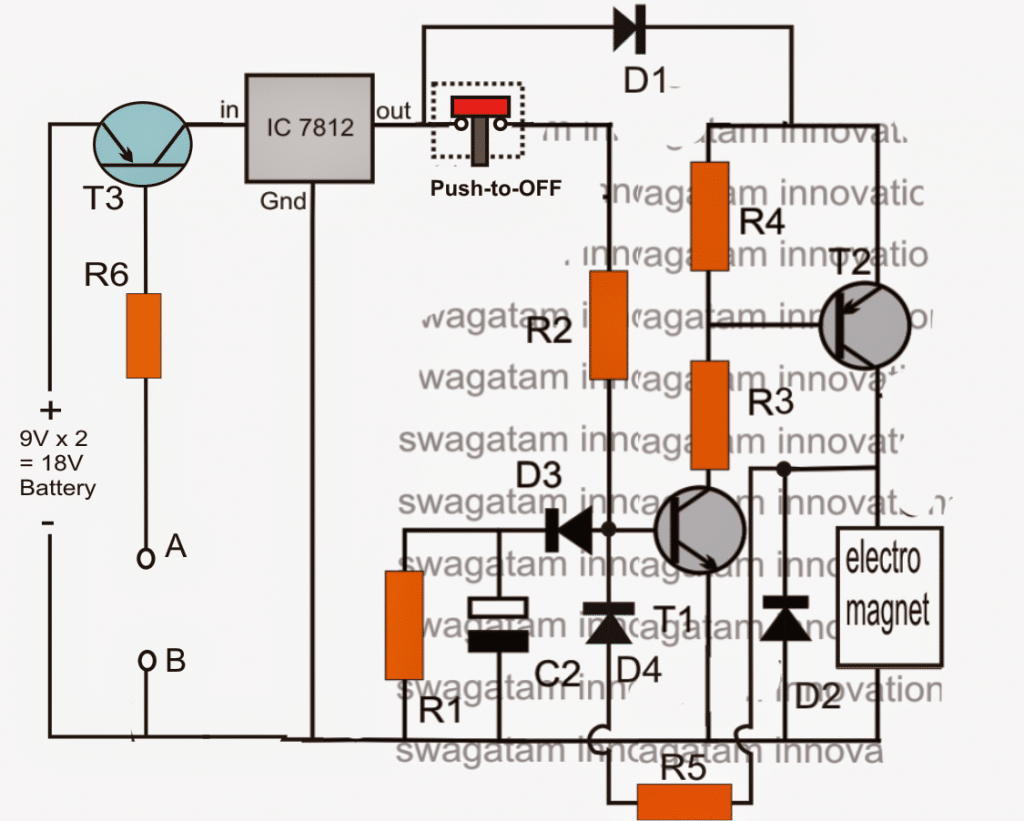
Obvod detektora kovov zabudovaný do riadiacich obvodov robota pozostáva z tranzistora, ktorý je poháňaný vyladeným obvodom oscilátora pozostávajúcim z cievky. Keď je detegovaný kov a elektrický prúd sa znova prenáša cez cievku, tranzistor 1 je v stave zapnutia a vedie ďalší tranzistor 2 do stavu vypnutia. Tento tranzistor3 zase napája ďalší tranzistor do vypnutého stavu. Tento konkrétny tranzistor 3 je pripojený k ďalšiemu tranzistoru 4, ktorý je pripojený tak, že je zapnutý, keď je jeho budiaci tranzistor 3 vypnutý. Tranzistor 4 je pripojený tak, že za podmienok je bzučiak a LED správne predpäté a začnú vodiť.

Bloková schéma jednotky detektora kovov
LED začne svietiť a bzučiak začne zvoniť. Takže keď je detekovaný kov, začne bzučiak zvoniť a LED bude svietiť.
Ovládanie robota:
Jednoduchý prototyp je možné ovládať pomocou RF komunikácie, čo je komunikačný systém krátkeho dosahu. Príkazy sa prenášajú pomocou vysielača a prijímajú sa prijímačom zabudovaným do obvodu robota na riadenie pohybu robota.

Bloková schéma sekcie vysielača
Vysielač sa skladá zo sady tlačidiel ako dopredu, dozadu, stop, doľava a doprava, ktoré sú stlačené, aby zabezpečili pohyb robota v ľubovoľnom smere. Tlačidlá sú pripojené k vstupnému portu mikrokontroléra. Mikrokontrolér po prijatí týchto signálov vyvíja zodpovedajúci 4-bitový signál paralelne cez ďalší I / O port, ku ktorému je pripojený integrovaný obvod kódovača. Kodér prevádza tieto signály na sériovú formu dát. RF vysielač moduluje tieto sériové dáta, ktoré sa prenášajú cez anténu.

Bloková schéma sekcie prijímača
Prijímacia časť namontovaná na robotovi pozostáva z RF prijímača, ktorý demoduluje tento signál. Dekodér IC prijíma tento signál v sériovej podobe a na svojom výstupe vyvíja zodpovedajúce 4-bitové paralelné dáta. Mikrokontrolér prijíma tieto dáta a podľa toho poskytuje riadiaci signál do budiča motora IC LM293D, ktorý poháňa oba motory.
Hasiace robotické vozidlo:
Koncepcia hasiace robotické vozidlo bojuje pri požiari. V posledných rokoch došlo k niekoľkým vážnym nehodám vrátane výbuchov ohňa a bomby. Vedeli sme o závažných požiarnych nehodách, ako sú jadrové elektrárne, ropa, plynové nádrže a chemické továrne, veľké požiarne priemyselné spoločnosti v týchto miestach, ktoré raz požiar založili, môžu byť veľmi vážne. Pri tomto výskyte zomreli tisíce ľudí. To je hasenie požiaru robotické vozidlo technológie. Toto robotické vozidlo slúžilo na hľadanie ohňa a na boj proti požiarom.

Hasiace robotické vozidlo
Pracovný princíp požiarneho robotického vozidla:
Robotické vozidlo bolo naložené tankerom na vodu. Čerpadlo je riadené bezdrôtovou komunikáciou (RF a mobilná komunikácia). Koniec vysielača pripojený k tlačidlám. Pomocou tohto tlačidla sa príkazy odosielajú do prijímača a riadiaci moment robota je vpred, vzad, vľavo a vpravo. Prijímací koniec, tri motory, sú spojené s mikrokontrolérom.

Bloková schéma vysielača

Bloková schéma prijímača
RF vysielač funguje ako RF diaľkové ovládanie, kde je dosah 200 metrov. V domácnosti, kanceláriách a priemysle sa požiarne senzory uchovávajú na určitých miestach, keď v blízkosti požiarneho senzora dôjde k požiaru. Senzory znamenajú, že sa príslušný bit prenáša do RF prijímača. RF prijímač je integrovaný do mikrokontroléra. Keď RF prijímač prijíma signály, ktoré odovzdávajú informácie do mikrokontroléra, robot sa pohybuje smerom k senzorom požiaru. Umiestnenia senzorov sú uložené v mikrokontroléri. Akonáhle robot dosiahne požadované miesto, zastaví sa a aktivuje postrekovač na daný oheň. Po odpálení robot ide do pôvodnej polohy. Celý obvod je riadený mikrokontrolérom.
Typy hasiacich robotických vozidiel:
Domáce hasiace robotické vozidlo :
Terénna akcia je obmedzená na aktuálnu Flore of house. Tento robot používa veľa domácich predmetov na vznietenie, keď niekto spí alebo je preč. Tento robot sa používa na zabezpečenie domácnosti a pomocou tejto aplikácie sa vo Flore otvárajú všetky dvere, pretože toto vozidlo sa pohybuje z jedného miesta na druhé v domácnosti. Požiarna oblasť musí byť bezpečná, aby nespôsobovala novú nehodu. Ďalšou vlastnosťou tohto robota je práca na veľkú vzdialenosť.
Priemyselný hasiaci prístroj:
Väčšina priemyselných odvetví čelí problémom s požiarnymi nehodami, ako sú plyn, benzín, jadrové elektrárne, chemický priemysel, obrovské škody a v okolí okolitých oblastí je viac mŕtvych. Tento robot má silu prenášať oheň vo vnútri horiacej oblasti a dodávať tak neobmedzené množstvo vody. Oheň spôsobuje zníženú viditeľnosť, extrémne horúčavy a mnoho ďalších situácií, ktoré môžu viesť k zraneniam.
Boj proti lesným požiarom:
Lesné požiare sú veľmi nebezpečné. Môže to byť krátka doba, ktorá spáli veľké množstvo lesných plôch. Aj mestské hasičské zbory musia riešiť lesné požiare v okolí mesta. Pred niekoľkými rokmi bolo v 90. rokoch zabitých asi 152 hasičov. Lesná požiarna robotika používa na chytanie ohňa a boj s ohňom. Tento robot používa na účely bezdrôtovej komunikácie externé riadiace zariadenie. Modul je spojený s výstupným koncom, ktorý slúži na hasenie lesného požiaru robota. Na riadenie lesného požiarneho robota sa používajú aplikácie ako snímač tlaku, snímač teploty, smogový snímač, infračervený snímač.
Po výzve!
Aj keď som o robote dostal základnú predstavu s detektorom kovov, stále zostáva veľká otázka - Ako viesť robota na nerovných terénoch, ktoré nie sú známe, najmä v prostrediach vystavených silným dažďom, prachu a vysokým teplotám. Ak chcete nájsť odpoveď a uverejniť svoje komentáre.