Obvod, ktorý umožňuje užívateľovi lineárne regulovať rýchlosť pripojeného motora otáčaním pripojeného potenciometra, sa nazýva obvod regulátora otáčok motora.
Tu sú predstavené 3 ľahko zostaviteľné obvody regulátora rýchlosti pre jednosmerné motory, jeden s MOSFET IRF540, druhý s IC 555 a tretí s IC 556 so spracovaním krútiaceho momentu.
Dizajn # 1: Radič otáčok jednosmerného motora na báze Mosfet
Veľmi chladný a ľahký obvod regulátora otáčok jednosmerného motora je možné zostaviť pomocou jediného mosfetu, rezistora a hrnca, ako je uvedené nižšie:

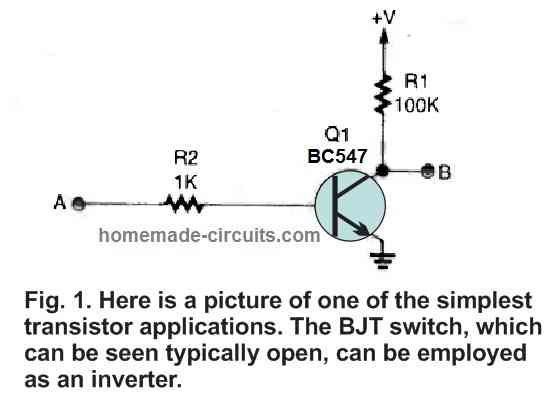
Používanie sledovača vysielača BJT

Ako je vidieť, mosfet je upravený ako zdrojový sledovač alebo bežný režim odtoku, aby ste sa dozvedeli viac informácií o tejto konfigurácii, môžete odkaz na tento príspevok , ktorý pojednáva o verzii BJT, zostáva pracovný princíp rovnaký.
Vo vyššie uvedenej konštrukcii ovládača jednosmerného motora vytvára nastavenie potu rozdielny potenciálny rozdiel cez bránu mosfetu a zdrojový kolík mosfetu jednoducho sleduje hodnotu tohto potenciálneho rozdielu a podľa toho upravuje napätie na motore.
Znamená to, že zdroj bude vždy o 4 alebo 5 V zaostávať za napätím brány a bude sa s týmto rozdielom meniť hore / dole, čo bude mať na motore premenlivé napätie medzi 2 V a 7 V.
Keď je hradlové napätie okolo 7V, zdrojový kolík dodá motoru minimálne 2V, čo spôsobí veľmi pomalé otáčanie motora, a 7V bude k dispozícii cez zdrojový kolík, keď nastavenie hrnca vygeneruje plných 12V cez bránu brány mosfet.
Tu jasne vidíme, že zdrojový kolík mosfetu sa zdá byť „nasledujúci“ za bránou, a teda aj nasledovník zdroja názvu.
Stáva sa to preto, lebo rozdiel medzi bránou a zdrojovým kolíkom mosfetu musí byť vždy okolo 5V, aby sa zabezpečil optimálny výkon mosfetu.
Vyššie uvedená konfigurácia každopádne pomáha vynútiť plynulú reguláciu otáčok motora a konštrukcia by sa dala postaviť celkom lacno.
Namiesto mosfetu by sa mohol použiť aj BJT a v skutočnosti by BJT produkoval vyšší riadiaci rozsah okolo 1V až 12V cez motor.
Video ukážka
https://youtu.be/W762NTuQ19gPokiaľ ide o rovnomerné a efektívne riadenie otáčok motora, ideálnou voľbou sa stáva regulátor na báze PWM, tu sa dozvieme viac o jednoduchom obvode na vykonanie tejto operácie.
Dizajn # 2: Riadenie jednosmerného motora PWM s IC 555
Konštrukciu jednoduchého regulátora otáčok motora využívajúceho PWM možno pochopiť nasledovne:
Spočiatku, keď je obvod napájaný, je spúšťací kolík v logicky nízkej polohe, pretože kondenzátor C1 nie je nabitý.
Vyššie uvedené podmienky iniciujú oscilačný cyklus, vďaka čomu sa výstup zmení na logicky vysokú hodnotu.
Vysoký výkon teraz núti kondenzátor nabíjať cez D2.
Po dosiahnutí úrovne napätia, ktorá je 2/3 napájania, sa aktivuje pin # 6, ktorý je prahovou hodnotou IC.
V okamihu, keď sa pin # 6 spustí, pin # 3 a pin # 7 sa vrátia na logicky nízku úroveň.
Keď je pin # 3 nízky, C1 sa opäť začína vybíjať cez D1, a keď napätie na C1 klesne pod úroveň, ktorá je 1/3 napájacieho napätia, pin # 3 a pin # 7 sa opäť zvýšia, čo spôsobí, že cyklus bude nasledovať a pokračuj v opakovaní.
Je zaujímavé poznamenať, že C1 má dve diskrétne nastavené cesty pre proces nabíjania a vybíjania cez diódy D1, D2 a cez odporové ramená nastavené v danom poradí.
Znamená to, že súčet odporov, s ktorými sa stretne C1 pri nabíjaní a vybíjaní, zostáva rovnaký bez ohľadu na to, ako je nastavená banka, preto vlnová dĺžka výstupného impulzu zostáva vždy rovnaká.
Pretože však časové obdobia nabíjania alebo vybíjania závisia od hodnoty odporu, ktorá sa nachádza v ich dráhach, hrniec diskrétne nastaví tieto časové obdobia podľa svojich úprav.
Pretože časové úseky nabíjania a vybíjania sú priamo spojené s výstupným pracovným cyklom, líšia sa podľa nastavenia banky, čím vytvárajú formu zamýšľaných meniacich sa impulzov PWM na výstupe.
Priemerný výsledok pomeru značka / priestor vedie k výstupu PWM, ktorý zase riadi jednosmerné otáčky motora.
Impulzy PWM sa privádzajú do brány mosfetu, ktorý reaguje a riadi prúd pripojeného motora v reakcii na nastavenie banky.
Aktuálna hladina v motore rozhoduje o jeho rýchlosti, a teda implementuje riadiaci efekt cez banku.
Frekvencia výstupu z IC sa môže vypočítať podľa vzorca:
F = 1,44 (VR1 * C1)
Mosfet je možné zvoliť podľa požiadavky alebo podľa zaťažovacieho prúdu.
Schéma zapojenia navrhovaného regulátora otáčok jednosmerného motora je uvedená nižšie:

Prototyp:

Dôkaz na testovanie videa:
https://youtu.be/M-F7MWcSiFYVo vyššie uvedenom videoklipe vidíme, ako sa návrh založený na IC 555 používa na riadenie rýchlosti jednosmerného motora. Ako ste mohli byť svedkami, hoci žiarovka funguje perfektne ako reakcia na PWM a mení svoju intenzitu od minimálneho vyžarovania po maximálnu nízku úroveň, motor nie.
Motor spočiatku nereaguje na úzke PWM, skôr začne trhnutím po tom, ako sa PWM upravia na podstatne väčšie šírky impulzu.
To neznamená, že obvod má problémy, je to preto, že kotva jednosmerného motora je pevne držaná medzi dvojicou magnetov. Aby sa spustil štart, musí kotva preskočiť svoju rotáciu cez dva póly magnetu, čo sa nemôže stať pri pomalom a jemnom pohybe. Musí to začať ťahom.
To je presne dôvod, prečo motor spočiatku vyžaduje vyššie úpravy pre PWM, a akonáhle je zahájená rotácia, kotva získa určitú kinetickú energiu a teraz je možné dosiahnuť užšiu rýchlosť pomocou užších PWM.
Stále je však nemožné dostať rotáciu do stavu sotva sa pohybujúceho pomalého pohybu z rovnakého dôvodu, ktorý je vysvetlený vyššie.
Snažil som sa čo najlepšie vylepšiť odozvu a dosiahnuť čo najpomalšie riadenie PWM vykonaním niekoľkých úprav v prvom diagrame, ako je uvedené nižšie:

Z tohto dôvodu by motor mohol vykazovať lepšiu kontrolu na nižších úrovniach, ak je motor pripevnený alebo pripútaný k bremenu prostredníctvom prevodov alebo kladkového systému.
Môže sa to stať, pretože bremeno bude pôsobiť ako tlmič a pomôže zaistiť riadený pohyb pri nastavovaní nižšej rýchlosti.
Dizajn # 3: Použitie IC 556 na vylepšené riadenie rýchlosti
Meniaca sa rýchlosť jednosmerného motora sa môže javiť ako nie tak zložitý a môžete preň nájsť dostatok obvodov.
Tieto obvody však nezaručujú konštantnú hladinu krútiaceho momentu pri nižších otáčkach motora, čo robí činnosť dosť neefektívnou.
Navyše pri veľmi nízkych otáčkach z dôvodu nedostatočného krútiaceho momentu má motor tendenciu sa zastaviť.
Ďalšou vážnou nevýhodou je, že tieto obvody neobsahujú žiadnu funkciu spätného chodu motora.
Navrhovaný obvod je úplne bez vyššie uvedených nedostatkov a je schopný generovať a udržiavať vysoký stupeň krútiaceho momentu aj pri najnižších možných rýchlostiach.
Prevádzka obvodu
Predtým, ako diskutujeme o navrhovanom obvode radiča motora PWM, chceli by sme sa tiež naučiť jednoduchšiu alternatívu, ktorá nie je taká efektívna. Môže sa to však považovať za primerane dobré, pokiaľ zaťaženie motora nie je vysoké a pokiaľ rýchlosť nie je znížená na minimálnu úroveň.
Obrázok ukazuje, ako možno na riadenie otáčok pripojeného motora použiť jeden integrovaný obvod 556, nebudeme sa rozpisovať podrobne, jedinou pozoruhodnou nevýhodou tejto konfigurácie je, že krútiaci moment je priamo úmerný otáčkam motora.
Keď sa vrátime k navrhovanej konštrukcii obvodu regulátora s vysokou krútiacou rýchlosťou, tu sme použili dva integrované obvody 555 namiesto jedného alebo skôr jeden integrovaný obvod 555, ktorý obsahuje dva integrované obvody 555 v jednom balení.
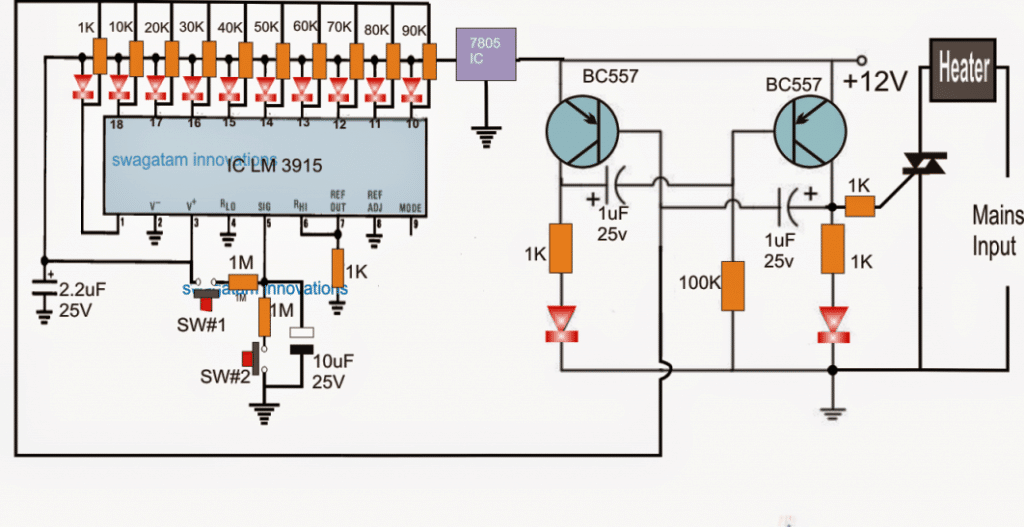
Schéma zapojenia

Hlavné rysy
Stručne navrhované Ovládač jednosmerného motora obsahuje nasledujúce zaujímavé funkcie:
Rýchlosť sa dá plynulo meniť z nuly na maximum bez zastavenia.
Krútiaci moment nie je nikdy ovplyvnený úrovňami otáčok a zostáva konštantný aj pri minimálnych úrovniach otáčok.
Otáčanie motora je možné prevrátiť alebo obrátiť do zlomku sekundy.
Rýchlosť je variabilná v oboch smeroch otáčania motora.
Dva 555 integrovaných obvodov sú priradené dvomi samostatnými funkciami. Jedna sekcia sa konfiguruje ako astabilný multivibrátor generujúci hodiny s obdĺžnikovou vlnou 100 Hz, ktoré sa napájajú do predchádzajúcej sekcie 555 vo vnútri balenia.
Vyššie uvedená frekvencia je zodpovedná za stanovenie frekvencie PWM.
Tranzistor BC 557 sa používa ako zdroj konštantného prúdu, ktorý udržuje nabitý susedný kondenzátor v jeho kolektorovom ramene.
Toto vyvíja napätie zuba na vyššie uvedenom kondenzátore, ktoré sa porovnáva vo vnútri obvodu IC 556 s napätím vzorky aplikovaným externe cez znázornený vývod.
Napätie vzorky, ktoré sa aplikuje externe, sa dá odvodiť z jednoduchého napájacieho obvodu s premenlivým napätím 0-12 V.
Toto premenlivé napätie privedené na 556 IC sa používa na zmenu PWM impulzov na výstupe a nakoniec sa použije na reguláciu rýchlosti pripojeného motora.
Spínač S1 slúži na okamžité obrátenie smeru motora, kedykoľvek je to potrebné.
Zoznam položiek
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ohmov,
- R7, R8, R9, R10 = 470 ohmov,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400 mW
- IC1 = 556,
- S1 = prepínač SPDT
Vyššie uvedený okruh bol inšpirovaný nasledujúcim obvodom vodičov motorov, ktorý bol publikovaný dávno v elektronickom časopise elecktor India.
Riadenie krútiaceho momentu motora pomocou IC 555

Prvý diagram riadenia motora je možné výrazne zjednodušiť použitím spínača DPDT pre činnosť obrátenia motora a použitím tranzistora sledovača emitora na implementáciu riadenia otáčok, ako je uvedené nižšie:

Presné riadenie motora pomocou jedného operačného zosilňovača
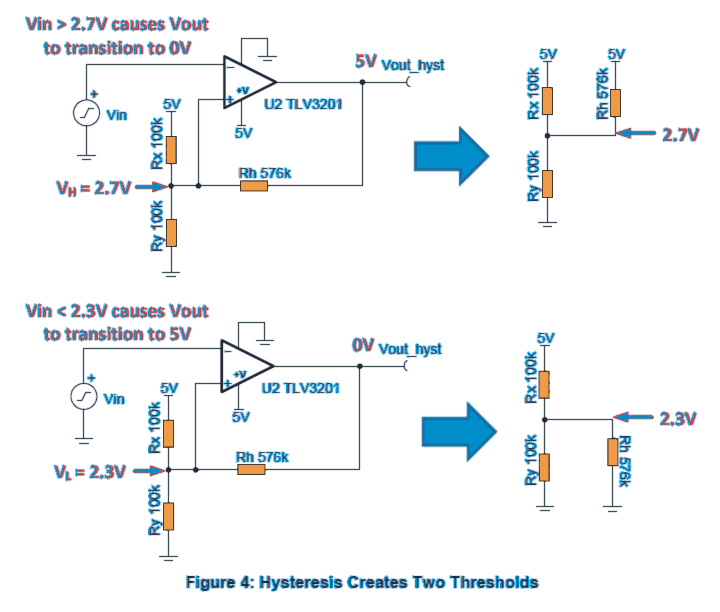
Mimoriadne prepracované alebo zložité riadenie jednosmerného prúdu motor by sa dal dosiahnuť použitím operačného zosilňovača a tachogenerátora. Operačný zosilňovač je zostavený ako spínač citlivý na napätie. V nižšie demonštrovanom obvode, akonáhle je výstup tachogenerátora nižší ako prednastavené referenčné napätie, zapne sa spínací tranzistor a motor bude mať 100% výkon.
Prepínanie operačného zosilňovača by sa uskutočnilo iba za pár milivoltov okolo referenčného napätia. Budete potrebovať duálny zdroj napájania, ktorý môže byť len zenerovo stabilizovaný.

Tento ovládač motora umožňuje nekonečne nastaviteľný rozsah bez akejkoľvek formy mechanických ťažkostí.
Výstup operačného zosilňovača je iba +/- 10% úrovne napájacích koľajníc, takže pri použití sledovača s dvojitým emitorom je možné ovládať obrovské otáčky motora.
Referenčné napätie je možné fixovať pomocou termistorov alebo LDR atď. Experimentálne nastavenie uvedené v schéme zapojenia využíva operačný zosilňovač RCA 3047A a 0,25 W 6 V motor ako tachogenerátor, ktorý generuje okolo 4 V pri 13 000 ot./min. zamýšľaná spätná väzba.
Ďalej: 3 najlepšie okruhy zlodejov Joule Ďalej: Obvod počítadla píšťaliek tlakového hrnca