Servomotory sú samostatné mechanické zariadenia, ktoré sa používajú na veľmi presné riadenie strojov. Nachádza sa v mnohých aplikáciách od hračiek po priemyselnú automatizáciu. Existuje mnoho druhov motorov, ale servomotory sú špeciálne konštruované pre konkrétnu uhlovú polohu na riadenie strojov. Servomotor sa zvyčajne používa na riadenie uhlového pohybu v rozmedzí od 0 ° do 180 ° a 0 ° až 90 °. The princíp fungovania servomotora na základe PWM ( modulácia šírky impulzu ) strukoviny.

Servo motor
Prepojenie servomotorov s mikrokontrolérom 8051
Servomotor je jedným z najbežnejšie používaných motorov na presný uhlový pohyb. Výhodou použitia servomotora je, že uhlovú polohu motora je možné ovládať bez spätnoväzbového mechanizmu. Servomotory sa zvyčajne používajú v komerčné a priemyselné aplikácie . Tiež sa často používajú v pohonných systémoch, ako sú roboty, lietadlá atď.

Prepojovací servomotor s mikrokontrolérom 8051
Princíp a prevádzka hobby servomotora sú veľmi jednoduché, pozostávali z troch vodičov, pričom dva z nich (čierny a červený) slúžili na napájanie a tretí vodič na napájanie riadiaceho signálu. Ako riadiace signály sa používajú vlny modulované šírkou impulzu (PWM) a uhlová poloha je definovaná šírkou impulzu na riadiacom vstupe. V tomto článku používame servomotor s uhlom otáčania od 0 do 180 ° a uhlovú polohu je možné ovládať zmenou pracovných cyklov medzi 1 ms až 2 ms.
Tu je servomotor prepojený s Mikrokontrolér 8051 , čierny vodič pripojený k uzemňovaciemu kolíku a motor získavajú energiu z červeného vodiča. Ovládanie servomotora pripojeného k portu 0 mikrokontroléra 8051. Kryštálový oscilátor 11,0592 MHz sa používa na zabezpečenie hodín pulzujúcich do mikrokontroléra a keramických kondenzátorov 22pf používaných na stabilizáciu činnosti kryštálu. Kondenzátor 10KΩ a 10uf sa používa na zabezpečenie resetovania mikrokontroléra.
Ovládanie servomotora s uhlovými otáčkami
Princíp fungovania servomotora závisí hlavne od pracovných cyklov. Ako riadiace signály používa vlny Pulse Width Modulated (PWM). Uhol natočenia je rozhodný podľa šírky impulzu ovládacieho kolíka. Tu sa servomotor používal na uhol natočenia od 0 do 180 stupňov. Presnú uhlovú polohu môžeme ovládať zmenou impulzu medzi 1ms až 2ms.

Ovládanie servomotora pomocou uhlových rotácií
Programovanie servomotora s uhlovými otáčkami
#include
Sbit servomotor_pin = P0 ^ 5
Oneskorenie neplatnosti (unsigned int)
Void servo_delay (unsigned int)
Neplatné main ()
{
Servomotor_pin = 0x00
Urob
{
// otočiť na 0 °
Servomotor_pin = 0x01
Sevo_delay (50)
Servomotor_pin = 0x00
Oneskorenie (1 000)
// otočiť o 90 stupňov
Servomotor_pin = 0x01
Sevo_delay (82)
Servomotor_pin = 0x00
Oneskorenie (1 000)
// otočiť o 180 stupňov
Servomotor_pin = 0x01
Sevo_delay (110)
Servomotor_pin = 0x00
Oneskorenie (1 000)
Zatiaľ čo (1)
}
}
Meškanie neplatnosti (nepodpísané v a)
{
Nepodpísaný int p
Pre (p = 0 s
}
Void servo_delay (unsigned int a)
{
Nepodpísaný int p
Pre (p = 0 s
}
Princíp fungovania servomotora
Princíp fungovania servomotora závisí predovšetkým od „Flemingovho pravidla ľavej ruky“. Servomotory sú v zásade upravené pomocou Jednosmerné motory , snímač polohy, redukcia prevodovky a elektronický obvod. Jednosmerné motory sú napájané z batérie a pracujú pri vysokých otáčkach a malom krútiacom momente. Montovali sme hriadeľ a ozubené koleso pripojené k jednosmerným motorom, potom môžeme postupne zvyšovať a znižovať otáčky motora.
Snímač polohy sníma polohu hriadeľa z jeho pevnej polohy a odosiela informácie do riadiaceho obvodu. Riadiaci obvod príslušne dekóduje signály z polohového snímača a porovnáva skutočné umiestnenie motorov s preferovanou polohou a podľa toho riadi smer otáčania jednosmerného motora, aby získal potrebnú polohu. Všeobecne servomotor vyžaduje napájanie 4,8 V až 6 V ss.
Ovládanie servomotora pomocou sériového portu
Hlavným zámerom tohto projektu je riadenie servomotora pomocou osobného počítača. Na zasielanie príkazov do obvodu potrebuje jednu riadiacu linku z mikrokontroléra a sériového vstupného vedenia zo sériového portu osobného počítača. Zdroj časovania poskytuje kryštálový oscilátor. Navrhnutý obvod servomotora je prepojený s počítačom pomocou sériového kábla a posúvača úrovne a potom otvorí softvér „Hyper Terminal“ v počítači, aby sa zvolil typ počítača.

Ovládanie servomotora pomocou príkazov sériového portu
Akonáhle sú príkazy odoslané z osobného počítača (PC) do mikrokontroléra cez hyper terminál s radičom úrovne, mikrokontrolér získa tieto údaje a porovná ich s preddefinovanými údajmi a generuje zodpovedajúce signály na aktiváciu vodiča motora, aby ho riadil na požadovaná rýchlosť. Veľa projekty mikrokontrolérov vyvinutý na základe servomotora, ako sú vyvažovacie roboty, pristávacie dráhy vrtuľníkov atď. Z bezpečnostných dôvodov môžeme použiť servomotor prepojením s bezdrôtovou kamerou, pretože je možné ovládať odklon kamery 360.
Samovyvažovací robot
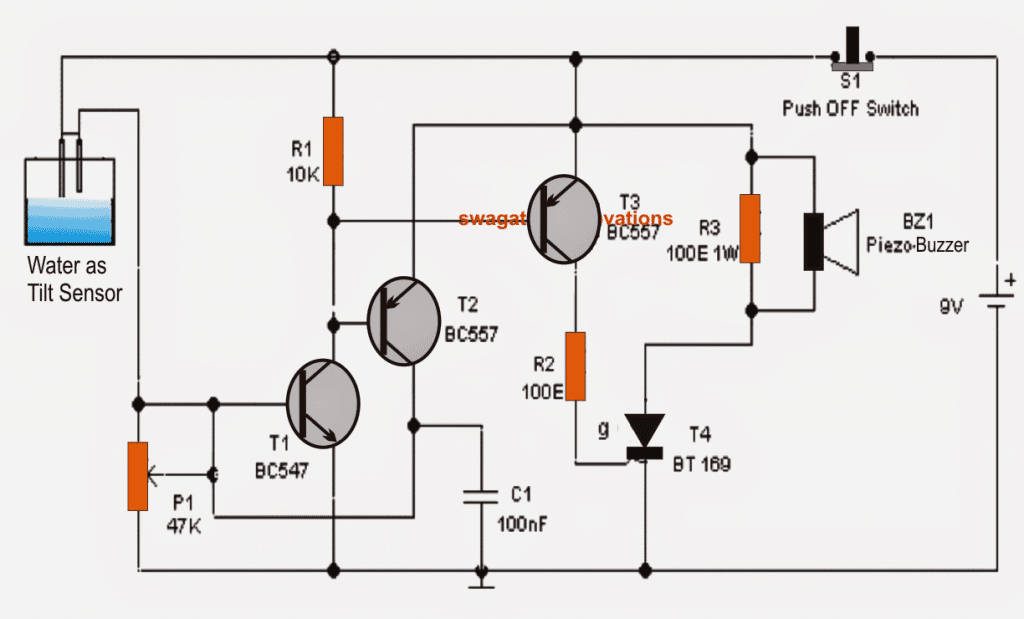
Samovyvažovací robot je schopný sám sa vyvažovať pomocou servomotorov. Tento robot sa zostavil pomocou konštrukčných, mechanických a elektronických komponentov, ktoré vytvárajú viditeľne nevyváženú platformu, ktorá je vysoko náchylná na vyklápanie v jednom zarovnaní. Kolesá robota sú schopné samostatnej rotácie dvoma spôsobmi, ktoré sú poháňané servomotorom. Informácie o uhle zariadenia voči zemi sa získajú z snímače náklonu na prístroji.

Samovyvažovací robot
Senzorom náklonu môže byť akcelerometer, gyroskopický senzor alebo IR senzor (na meranie vzdialenosti od zeme). Senzory odosielajú informácie do riadiacej jednotky, ktorá spracuje spätnú väzbu pomocou základného proporcionálneho, integrálneho derivačného (PID) algoritmu na generovanie kompenzačných riadiacich signálov polohy do servomotorov s cieľom vyvážiť zariadenie.
Aplikácie servomotorov
- Používa sa v lisoch na rezanie kusov na požadovanú veľkosť
- Používa sa v čerpacej stanici cukru
- Používa sa v označovacích aplikáciách
- Používa sa systém balenia s funkciou náhodného načasovania
- Používa sa Používa sa v lietadlách
Výhody servomotora
- Ak je motor silne zaťažený, vodič zvýši prúd do motorovej cievky, keď sa bude usilovať o otáčanie motora. Hlavne, nie je tam žiadny mimosúdny stav.
- Vysokorýchlostnú prevádzku umožňujú servomotory.
Jedná sa o princíp fungovania servomotora a prepojenie s mikrokontrolérom 8051 Ďalej za technickú pomoc týkajúcu sa tohto článku alebo projekty elektroniky ktoré sú navrhnuté pomocou prepojovacích zariadení, ako sú RTC, OLED, flash pamäte, prispôsobené LCD, dotykové displeje atď. Môžete sa na nás obrátiť uvedením svojich komentárov v sekcii komentárov nižšie.