V tomto príspevku skúmame, čo je motor BLDC, a následne sa dozvieme, čo sa týka návrhu bezsenzorového obvodu budiča motora BLDC.
BLDC ventilátory
Videli ste tých rýchlo sa pohybujúcich fanúšikov v procesoroch, stabilizátoroch napätia, DVD prehrávačoch a iných podobných zariadeniach, ktoré pracujú s maximálnou účinnosťou, zaberajú minimum miesta, prúd a napriek tomu sú schopné vykonávať dôležité operácie stanovené pre konkrétne zariadenie?
Áno, toto sú všetky moderné verzie ventilátorov BLDC alebo jednosmerných motorov s jednosmerným prúdom, ktoré sú oveľa lepšie ako staré tradičné motory s jednosmerným prúdom.

Obrázok so zdvorilosťou: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Avšak motor BLDC bude vyžadovať prepracovaný obvod ovládača a áno, všetky tieto ventilátory CPU obsahujú tieto moduly ovládača zabudované, aj keď sa zdajú byť ľahko ovládateľné pomocou bežného jednosmerného prúdu, systém je už vybavený inteligentným obvodom.
Ovládač motora BLDC
Tu sa dozvieme o jednom takom inteligentnom obvode ovládača motora BLDC, ktorý používa jediný čip DRV10963 na pohon ľubovoľného malého motora BLDC s neuveriteľnou účinnosťou, a neskôr v jednom z pripravovaných článkov uvidíme, ako môže byť tento obvod IC vylepšený pre riadenie aj výkonné silnoprúdové BLDC, ako sú tie, ktoré sú používané v kvadrokoptérach.
Ale predtým by bolo zaujímavé dozvedieť sa niečo o BLDC motoroch.
Rozdiel medzi kartáčovanými a bezkartáčovými jednosmernými motormi
Rozdiel medzi kartáčovaným motorom a bezkartáčovým motorom a miera účinnosti je dosť zrejmý.
Pretože u kartáčovaných motorov sa samotná vinutá kotva pohybuje medzi magnetmi, musí sa používať „kefka“ (trenie kontaktu), aby svorky pohyblivej cievky boli schopné konzistentne prijímať napájacie napätie bez toho, aby museli dosiahnuť samotný zdroj napájania, čo by inak spôsobilo, že nemožné a ohroziť prevádzku.
V bezkartáčovom motore sa cievka alebo vinutie nikdy nepohybujú a sú konštantné. Tu rotor nesie sústavu permanentných magnetov a otáča sa pod vplyvom magnetických tokov okolitého vinutia.
Pretože magnet neobsahuje žiadne ťažkosti a je schopný pracovať bez zapojenia terminálov na riadenie alebo príjem energie, môže ísť bez námahy a točiť sa vysokou rýchlosťou a takmer na bezhlučnej úrovni.
Má to však háčik. Aby bol elektromagnet schopný reagovať na toky permanentného magnetu, musí dôjsť k neustálemu posuvu magnetickej fázy alebo pólov, aby boli obidva náprotivky schopné neustále reagovať a prechádzať protichodnou silou, čím uvoľnia požadovanú torznú silu nad rotora a vykonajte rotáciu s výsledným krútiacim momentom.
U kartáčovaného motora je to jednoduchšie vďaka samonastavovacej povahe cievky kotvy, ktorá je schopná otáčať sa a vytvárať samonosnú protichodnú magnetickú silu a udržiavať ju v rotácii bez potreby akýchkoľvek externých impulzov alebo spracovania.
V BLDC to však predstavuje problém, pretože rotor magnetu zostáva „bezradný“ a vyžaduje vypočítaný magnetický príkaz z vinutia, aby sa mohol zmysluplne a nie náhodne otáčať.
To je presne dôvod, prečo všetky motory BLDC nevyhnutne vyžadujú obvod budiča motora na riadenie troch odlišných súprav vinutí vo vnútri motora.
Všetky BLDC sú teda v podstate trojfázové motory a na výrobu rotačného momentu na rotore nevyhnutne vyžadujú 3 fázy.
Čo robia bezsenzorové ovládače BLDC
Obvod budiča BLDC bez snímača jednoducho elektrifikuje 3 sady vinutí sekvenčným spôsobom tak, že magnetický rotor je schopný prechádzať konzistentnou protichodnou silou, čo umožňuje motoru dosiahnuť trvalý krútiaci moment a rotačnú silu.
Toto postupné napájanie vinutia BLDC obvodom však nie je možné nastaviť iba tak náhodne, musí byť v tandeme alebo v reakcii na polohu otáčania magnetu rotora, inak by implementácia mohla ísť napevno a môžeme byť svedkami hriadeľa motora (rotor ) rotujúce náhodne, to znamená trhaním medzi hodinovými ručičkami a proti smeru hodinových ručičiek bez rozumného otáčania.
Prečo sa snímače používajú v motoroch BLDC
Preto predstavujeme snímače umiestnené vo vnútri mnohých variantov motorov BLDC, tieto snímače (zvyčajne snímače s Hallovým efektom) „chápu“ meniacu sa polohu magnetických pólov magnetu rotora, dávajú pokyn pripojenému obvodu procesora, aby elektrifikoval príslušné vinutie a vykonal rotačný pohyb s optimálnym krútiacim momentom.
Senzory Hallovho efektu sa efektívne využívajú vo väčšine motorov BLDC, ktoré sú relatívne väčšie, ale pre menšie motory, ako sú napríklad ventilátory CPU, jednotky CPU, DVD prehrávače, malé výfukové ventilátory, pre motory používané v kvadrokoptérach sa snímače Hallovho javu môžu stať nevhodnými a preto je implementovaný alternatívny prístup bez senzorov.
To zahŕňa využitie inherentnej spätnej EMF elektriny vinutia, ktorá sa berie ako referenčný zdroj na spracovanie a elektrifikáciu príslušných množín vinutia a vykonávanie točivého momentu.

Simulácia pohybu rotora BLDC
Vo vyššie uvedenej surovej simulácii môžeme vizualizovať, ako sa uvoľnený spätný EMF berie ako referencia a používa sa na výrobu sekvenčných impulzov pre nasledujúce sady vinutí, čím sa rotačný krútiaci moment ukladá na rotor centrálneho permanentného magnetu. Simulácia nemusí byť presnou replikáciou, napriek tomu poskytuje približnú predstavu o fungujúcom princípe.
Je zaujímavé si uvedomiť, že impulz sa prepne, keď je N / S magnetu presne v strede jadra vinutia, čo umožňuje vinutiu buď napájať ako N alebo S v závislosti od polarity impulzu a vytvárať priťahovanie a odpudzovanie sila na N / S magnety, čím sa generuje požadovaný krútiaci moment na maximálnej možnej úrovni.
A to je zase možné vďaka spätnému EMF uvoľnenému prepnutím predchádzajúceho vinutia.
Vyššie uvedená diskusia objasňuje prácu motora BLDC bez snímača, poďme sa teraz naučiť, ako špecifikovaný obvod zvláda vyššie uvedené komplexné vykonávanie trojfázového spínania
Ovládač BLDC DRV10963
Po nejakom vyhľadávaní Googlom som našiel tento bezsenzorový obvod vodiča BLDC pomocou jediného čipu DRV10963, ktorý v konfigurácii využíva zanedbateľné množstvo dielov a napriek tomu dokáže implementovať sofistikované spracovanie pre zamýšľané akcie.
DRV10963 je najmodernejší čip, ktorý je špeciálne navrhnutý na prevádzku BLDC motorov bez snímača iba tak, že predbieha spätný EMF od vinutia motora a vydáva presný príkaz nad vinutím a dosahuje optimálny krútiaci moment nad rotorom.
Schéma zapojenia

Vyššie uvedený obrázok ukazuje jednoduché rozloženie obvodu, ktorý zjavne neobsahuje nič iné ako samotný IC.
Rôzne vývody sú vyhradené na vykonávanie špecifikovaných funkcií, ako je napríklad regulácia otáčok PWM motora, riadenie smeru atď., Jednoduchým napájaním príslušných vývodov špecifikovanými údajmi z externého zdroja.
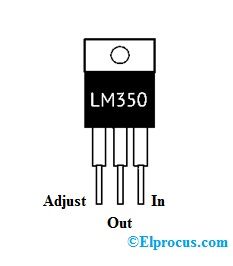
Nasledujúci obrázok zobrazuje balíček čipu, ktorý vyzerá ako 10-pinový DIL IC, z ktorého je možné študovať rôzne jeho funkcie pinout z údajov uvedených v schéme:

S odkazom na schému zapojenia navrhovaného obvodu snímača BLDC bez snímača ako je uvedené v predchádzajúcom článku a tiež na čipovom obrázku vyššie, podrobnosti o pinoutoch možno chápať takto:
Detaily IC Pinout
FG = Je to kolík indikátora otáčok motora (výstup), ktorý je vybavený v režime otvoreného kolektora s vnútorným BJT.
Otvorený kolektor znamená, že výstup na tomto vývode bude produkovať záporné PWM potopením logiky cez otvorený kolektor a zem, takže na získanie platného údaja bude užívateľ musieť pripojiť pull up odpor cez tento otvorený kolektor a kladné napájanie (5 V). ) na dosiahnutie indikácie rýchlosti na tomto vývode.
FGS = Je to vstup voliča indikátora rýchlosti, čo znamená, že tu môže byť zavedená logická hodnota vysoká alebo nízka pre zapnutie / vypnutie kolíka indikátora FG.
Vcc = Kladný prívod do IC na umožnenie jeho činnosti nesmie prekročiť 5V.
W, U a V sú 3-fázové výstupy pre motor BLDC, ktorý sa má prevádzkovať prostredníctvom tohto integrovaného obvodu. Toto tiež slúži ako vstupy na snímanie impulzov EMF motora na požadované synchronizované spínanie cievok motora.
GND = Vzťahuje sa na záporný pin napájania IC vzhľadom na kolík Vdd.
FR = Pomáha zvoliť alebo ovládať smer motora a možno ho dynamicky meniť kedykoľvek po zapnutí systému, jednoduchým zavedením externej logickej výšky alebo logickej výšky.
PWM = Znamená PWM riadiaci vstup z externý generátor kriviek PWM.
Tento PWM vstup môže byť premenlivý na implementáciu požadovanej regulácie otáčok pripojeného BLDC motora.
Bodkovaný priestor v strede čipu označuje tepelnú podložku, ktorú je možné upnúť alebo stlačiť pomocou chladiča, aby sa potlačila možná tvorba tepla na čipu pri jeho použití s nabitým motorom BLDC.
Vyššie uvedená diskusia uvádza pinout alebo podrobnosti pripojenia bezsenzorového čipu vodiča BLDC motora DRV10963, poďme si teraz podrobne analyzovať vnútornú konfiguráciu a fungovanie čipu pomocou nasledujúcich bodov:
Popis zariadenia
DRV10963 je trojfázový operátor bez elektromotora so zabudovanými výkonovými MOSFETmi (3-fázový H-premostený). Je šitý na mieru vyššej produktivite, zníženej hlučnosti a minimálnemu počtu motorových funkcií s počtom sekundárnych materiálov. Exkluzívna bezsenzorová systémová regulácia sínusového uhla 180 ° so sínusovým uhlom 180 ° zaisťuje bezhlučnú účinnosť dochádzania motora.
Model DRV10963 je tvorený funkciou detekcie inteligentného zámku spolu s dodatočnými zabudovanými bezpečnostnými obvodmi na dosiahnutie zabezpečeného výkonu. Produkt DRV10963 nájdete v tepelne účinnom 10-pólovom balení USON s nekrytou tepelnou podložkou.
Ako IC funguje
Produkt DRV10963 je trojfázový bezsenzorový motorový operátor s napájanými MOSFETmi, to je
vytvorené špeciálne pre vynikajúci výkon, zníženú rezonanciu a minimálny počet funkcií povrchového pohonu motora.
Hlavný bezsenzorový sínusový plán riadenia bez okien s uhlom 180 ° predstavuje nehlučné fungovanie motora tým, že udržuje nominálne elektricky stimulované zvlnenie krútiaceho momentu. Po inicializácii zariadenie DRV10963 bude otáčať motor v smere určenom cez vstupný pin FR.
Čip DRV10963 bude pracovať s trojfázovým motorom BLDC s využitím plánu sínusového riadenia.
Význam použitých sínusových fázových napätí závisí od pracovného cyklu kolíka PWM. Zatiaľ čo sa motor pohybuje, DRV10963 IC dodáva údaje o rýchlosti na kolíku FG.
Jednotka DRV10963 pozostáva z funkcie snímania pomocou inteligentného zámku. V prípade, že dôjde k zastaveniu motora vonkajším tlakom, program identifikuje problém so zablokovaním a sám prijme opatrenia na zabezpečenie spolu s motorom.
Konkrétny postup obvodu snímania zámku je podrobne opísaný v časti Detekcia zámku. DRV10963 IC ďalej obsahuje viac zabudovaných bezpečnostných obvodov, napríklad nadprúdovú ochranu, prepäťovú ochranu, podpäťovú ochranu a ochranu proti prehriatiu.
Charakteristické vysvetlenie
Vstup a ovládanie rýchlosti
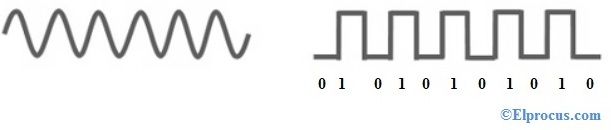
DRV10963 predstavuje 3-fázové 25-kl-lz PWM výstupy, ktoré môžu mať štandardné percento sínusových priebehov z fázy na fázu. V prípade, že sa určuje akýkoľvek cyklus vzhľadom na zem, je detekovaný tvar vlny pravdepodobne sínusoida chránená PWM v kombinácii s harmonickými harmonickými 3. rádu, ako je znázornené na obrázku 2.

Táto stratégia kódovania zjednodušuje špecifikácie ovládačov z toho dôvodu, že pravdepodobne často existuje jednofázový výstup, ktorý by mohol byť na rovnakej úrovni ako nula.
Výsledná amplitúda sa líši v závislosti na napájacom napätí (VCC) a nariadenom pracovnom cykle PWM (PWM), ako je definované v rovnici 1 a zvýraznené na obrázku 3. Optimálna amplitúda sa implementuje, keď je požadovaný pracovný cyklus PWM 100 PERCENT.
Vphpk = PWMdc>

Otáčky motora nie sú regulované priamo pomocou PWM, aby sa regulovala amplitúda fázových napätí, ktoré sa náhodou používajú pre motor.
Pracovný cyklus vstupu PWM je upravený na 9-bitovú digitálnu veličinu (od 0 do 511).
Rozlíšenie regulácie je 1/512 == 0,2%. Analyzátor pracovného cyklu umožňuje počiatočnú operáciu výmeny príkazov medzi vstupným pracovným cyklom a 9-bitovou digitálnou číslicou.
Toto je zvýraznené na obrázku 4, na ktorom r = 80 ms.

Výmenný výkon medzi PWM objednaným pracovným cyklom a výstupnou maximálnou amplitúdou je v zariadení DRV10963 variabilný.
O maximálnej amplitúde výsledku pojednáva rovnica 1, keď príkaz PWM> minimálny funkčný pracovný cyklus. Najnižší prevádzkový pracovný cyklus sa často nastavuje na 13%, 10%, 5% alebo bez obmedzenia OTP nastavením (MINOP_DC1: 0).
Tabuľka 1 ukazuje odporúčané konfigurácie pre minimálny pracovný cyklus.
Kedykoľvek je pracovný cyklus podľa pokynov PWM menší ako najnižší funkčný pracovný cyklus a viac ako 1,5%, výstup bude regulovaný pri minimálnom pracovnom cykle. Kedykoľvek je pracovný cyklus vstupu nižší ako 1,5%, zariadenie DRV10963 pravdepodobne nespustí výstup a je odoslané do pohotovostného režimu.
Toto je možné ilustrovať na obrázku 6.

Rotačné konfigurácie
DRV10963 naštartuje motor pomocou techniky, ktorá je podrobne uvedená na obrázku 7.

Graf inicializácie motora pozostáva z konfigurovateľných alternatív zariadenia pre limit prepínania medzi otvorenou a uzavretou slučkou (HOW.), Čas zarovnania (TAHQH) a rýchlosť zrýchlenia (RACE).
Na zaradenie rotora do komutačnej logiky vykoná DRV10963 x% pracovný cyklus vo fázach V a W súčasne s riadením fázy U pri GND.
Tento scenár pretrváva sekundy TAIign. Význam x% je identifikovaný napätím VCC (ako je uvedené v tabuľke 2), aby sa udržal dostatočný rotačný krútiaci moment pri rôznych napájacích napätiach.
Po dosiahnutí zosúladenej sekvencie je motor nútený zrýchliť sa uvedením na sínusové fázové napätia so špičkovými úrovňami, ako je znázornené v tabuľke 2, a zosilnením pomocou rozsahu komutácie s rozširujúcou sa rýchlosťou predstavovanou RASOU, až kým úroveň komutácie nezvýši na Hom , Hz.
Akonáhle je táto hranica dosiahnutá, DRV’l0963 sa prevedie do režimu uzavretej slučky, pričom priebeh komutačného pohonu je rozpoznaný zabudovaným riadiacim algoritmom, zatiaľ čo použité napätie je identifikované vstupom pracovného cyklu s príkazom PWM.
Limit prepínania otvorenej slučky na uzavretie slučky (Hom), čas zarovnania (TAHQH) a rýchlosť zrýchlenia (RACE) sú konfigurovateľné prostredníctvom konfigurácií OTP.
Voľba prahovej hodnoty pre odovzdanie (HOW,) sa zvyčajne schvaľuje hodnotením pokusov a omylov. Cieľom by bolo uprednostniť toleranciu odovzdania, ktorá by mohla byť čo najmenšia a ktorá umožňuje motoru bez námahy a verne prepínať medzi zrýchlením v otvorenej slučke a akceleráciou v uzavretej slučke.
Bežne motory so zvýšenými otáčkami (maximálna rýchlosť) vyžadujú vyššiu toleranciu odovzdania, pretože motory so zvýšenými otáčkami obsahujú zníženú Kt, a teda cenovo dostupnejšiu hodnotu BEMF.
Tabuľka 3 ukazuje konfigurovateľné preferencie tolerancie odovzdania. Najvyššia rýchlosť v elektrickej Hz sa osvedčuje ako referencia na uľahčenie výberu požadovanej rýchlosti odovzdania pre konkrétny príspevok.

Výber času zarovnania (TAHQH) a rýchlosti zrýchlenia (RACE) môže byť dokonca podmienený vyšetrením pokusom a omylom.
Motory s väčšou zotrvačnosťou zvyčajne vyžadujú predĺžený čas zarovnania a pomalšiu rýchlosť zrýchlenia na rozdiel od motorov s nízkou zotrvačnosťou, ktoré bežne vyžadujú kratší čas vyrovnania spolu s rýchlejším percentom zrýchlenia. Je potrebné implementovať kompromisy programu, aby sa využila stabilita spustenia, na rozdiel od obdobia rotácie nahor.
TI schvaľuje počnúc rozhodnutím o menej intenzívnych konfiguráciách (pomalší RACE a výrazný Tmign), aby sa skomplikoval čas zvyšovania krútiaceho momentu na podporu maximálnej miery plnenia.
Len čo sa potvrdí, že zariadenie vykonáva svedomite, môžu sa použiť mimoriadne silné konfigurácie (väčší RACC a menší TAHQH) na zníženie momentu príchodu a zároveň na opatrné sledovanie miery plnenia.
V tabuľke 4 sú uvedené konfigurovateľné nastavenia pre TA'g ,, a RACE.

Zvyšná časť vysvetlenia týkajúceho sa tohto bezsenzorového modulu BLDC IC je poskytnutá v tomto pôvodnom údajovom liste
Ak máte záujem o viac informácií o vyššie diskutovaných podrobnostiach obvodu vodiča BLDC motora bez snímača, neváhajte komentovať
Dvojica: Obvod napájacieho zdroja 12V LED batohu Ďalej: Obvod diaľkového ovládania kvadrokoptéry bez MCU