Príspevok vysvetľuje, ako vyrobiť lacný, ale výkonný diaľkovo ovládaný vozík, s ktorým môže užívateľ manévrovať podľa potreby doľava, doprava, dopredu a dozadu pomocou daného diaľkového telefónu. Táto myšlienka sa nespolieha na obvod mikrokontroléra.
V jednom zo svojich predchádzajúcich príspevkov som hovoril o a jednoduchý diaľkovo ovládaný okruh autíčka , súčasná myšlienka vozíka s diaľkovým ovládaním je inšpirovaná rovnakou koncepciou, ale je určená na prepravu hrozivých a oveľa ťažších nákladov.
Diaľkovo ovládaný vozík pre maloobchodné predajne
Tento dizajn môže byť špeciálne vhodný a použiteľný pre obchodné centrá alebo maloobchodné predajne, kde môže byť realizovaný ako malé dopravné vozidlo na prepravu materiálu v areáli alebo prevádzkarni pomocou niekoľkých stlačení vzdialenej jednotky Tx.
Prvým krokom pri zostavovaní navrhovaného diaľkovo ovládaného vozíka by bolo zaobstaranie sady štandardných Rx / Tx RF modulov buď od miestneho elektronického predajcu alebo z ľubovoľného online obchodu, odporúčam nákup z online obchodu, pretože by to bolo oveľa jednoduchšie a pohodlnejšie. , aj keď nákladnejšie.
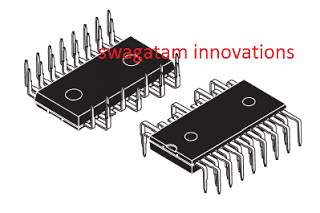
Obstarané jednotky budú vyzerať takto:
Používanie modulov Tx, Rx 433 MHz

Ľavá strana hnedej farebnej jednotky je Tx alebo vysielacia jednotka, zatiaľ čo široký susedný obvod je Rx alebo prijímacia jednotka.
Jednotku Tx je možné vidieť na 4 červeno sfarbených tlačidlách označených ako A, B, C, D a na doske Rx možno vidieť 4 relé (čierne farebné políčka).
Štyri príslušné tlačidlá modulu Tx sú bezdrôtovo spojené na ovládanie štyroch zodpovedajúcich relé modulu Rx.
Vidíte konektory pripevnené okolo okrajov dosky (zelené), tieto konektory sú príslušne zakončené napájacími vstupmi (+) (-) pre dosku Rx a tiež kontaktmi relé pre všetky 4 relé.
Relé, ako všetci vieme, sa skladá z 5 základných kontaktov a ich pinoutov, tj: 2 piny pre cievku, jeden pre pól a jeden pre N / C a N / O.
Pretože v jednotke Rx sú 4 relé, budete môcť nájsť 5 x 4 = 20 výstupov spojených s príslušnými konektorovými bodmi.
Môže byť namáhavá úloha samostatne sledovať tieto zakončenia relé na konektoroch, preto odporúčam spájkovať vodiče priamo na vývodoch relé, aby ste sa ušetrili od vyššie uvedenej úlohy, bude toto úsilie potrebné neskôr, keď zapojíme jednotku do riadiaci obvod vozíka.
Zostavenie riadiaceho obvodu relé pre vozík
Budete na to potrebovať niekoľko relé a diód. Relé by mali byť správne dimenzované, aby zvládli vysokovýkonné kolesové motory vozíka. Na to odporúčam použiť relé OEN make, ako je to znázornené na nasledujúcom obrázku:

Diódy, ktoré budú potrebné v obvode budiča relé, môžu byť naše štandardné diódy 1N4007.
Podrobnosti o obvode sú uvedené v nasledujúcej schéme:
Detaily a schéma zapojenia relé


Ako funguje obvod diaľkového vozíka
Pomocou vyššie uvedených relé a diód budete musieť dokončiť zostavu vyššie uvedenej dosky s obvodmi budiča relé, čo sa dá jednoducho vykonať na kúsku veroboardu.
Potom máme k dispozícii hlavnú úlohu, ktorou je integrácia zelených vodičov znázornených na vyššie uvedenom diagrame s doskou Rx na diaľkové ovládanie.
Pred integráciou budeme musieť vložiť niektoré mody do modulu Rx, ako je vysvetlené nižšie:
Pomocou kúskov izolovaných drôtov, vhodne odizolovaných a pocínovaných na koncoch, pokračujte v spájaní (spájkovaním) všetkých pólových pinov relé a spojte tento spoločný kĺb s kladným vedením dosky Rx.
Teraz v tejto situácii môžeme predpokladať, že keď relé nie sú v aktivovanom stave (prostredníctvom diaľkového slúchadla), kladný vstup pólu každého relé bude prepojený s ich príslušnými N / C bodmi, a keď je aktivovaný, kladný pól z pólu bude posunúť a spojiť sa s príslušnými N / O bodmi.
Stručne povedané, pri aktivácii N / O kontakt dostane kladné napájanie, a preto nás zaujíma toto pozitívne napájanie z N / O kontaktov, pretože tieto budú iniciované iba vtedy, keď sú aktivované relé, čo znamená, že keď je Tx (vysielač ) sú stlačené tlačidlá.
Preto musia byť všetky príslušné zapojenia N / O pripojené k zeleným vodičom vyššie uvedeného obvodu budiča relé.
Akonáhle je toto hotové, Rx bude integrovaný s modulom ovládača relé na vykonávanie všetkých zamýšľaných manévrov diaľkovo ovládaného vozíka, to znamená: pohybu dopredu, dozadu, pohybu a ľavého a pravého zákruty.
Napájanie dosky ovládača relé
Pretože relé v stupni budiča relé by boli zodpovedné za pohyb ťažkých motorov spojených s trolejovým kolesom, musel by byť ich prívod rovnako silný, preto sa ideálne hodia pre túto aplikáciu olovené akumulátory s hlbokým cyklom.
Za predpokladu, že motory majú hodnotu 12V, by bola olovená batéria s kapacitou 40 Ah dostatočná na to, aby sa vozík mohol pohybovať aj pri väčšom zaťažení.
Konfigurácia kolies s motormi na zamýšľané manévre
Ako je možné vidieť na nasledujúcom obrázku, diskutovaný diaľkovo ovládaný vozík bude vyžadovať 4 kolesá na zabezpečenie a odvalenie systému.
Iba dve predné kolesá by však boli zodpovedné za umožnenie zamýšľaného manévru vzad, dopredu, doprava a doľava, a preto by bolo potrebné, aby boli motory upnuté týmito dvoma prednými kolesami vozíka, ako je to znázornené na nasledujúcom obrázku:

Konfigurácia pripojení trolejového kolesa
Zadné kolesá sú iba fiktívne kolesá, ktoré sú upevnené iba na umožnenie voľného rolovania vozíka v reakcii na príkazy predných kolies.
Ako je možné vidieť na vyššie uvedenom obrázku, modul označený ako zostava PCB je doska budiča relé, diaľkový modul označuje dosku diaľkového prijímača Rx, zatiaľ čo batéria je batéria 40 AH 12V, o ktorej sme hovorili v predchádzajúcej časti článku.
Po zostavení bude možno potrebné doladiť a skontrolovať zapojenie vodičov motora s doskou budiča relé.
Pre pohyb vpred a vzad musia byť obidva motory navzájom synchronizované, na druhej strane na vykonanie pravého alebo ľavého prevrátenia musia motory prechádzať opačným rotačným pohybom.
Ak zistíte, že sa motor nespráva vyššie uvedeným spôsobom, možno to pravdepodobne napraviť jednoduchou výmenou polarity jedného z motorov. To okamžite napraví situáciu a prinúti motory, aby vykonali stanovené manévre.
Nakoniec môžu byť tlačidlá A. B, C, D vhodne priradené alebo zamenené pre ktorýkoľvek z príslušných manévrov vyladením zelených vodičových spojení s modulom Rx podľa osobných preferencií používateľov.
Dvojica: Ako upraviť SMPS pre nastaviteľný výstupný prúd a napätie Ďalej: Mikrovlnný senzor alebo obvod dopplerovského senzora