
Krokový motor je elektromechanické zariadenie, ktoré premieňa elektrickú energiu na mechanickú. Jedná sa tiež o bezkartáčový synchrónny elektromotor, ktorý dokáže rozdeliť celú rotáciu na rozsiahly počet krokov. Polohu motora je možné presne ovládať bez spätnoväzbového mechanizmu, pokiaľ je motor starostlivo dimenzovaný pre danú aplikáciu. Krokové motory sú podobné spínaným reluktančné motory. Krokový motor využíva teóriu magnetov na to, aby hriadeľ motora otočil o presnú vzdialenosť, keď je k dispozícii impulz elektriny. Stator má osem pólov a rotor má šesť pólov. Rotor bude vyžadovať 24 impulzov elektrickej energie na to, aby presunul 24 krokov, aby vykonal jednu úplnú otáčku. Ďalším spôsobom, ako to povedať, je, že rotor sa bude pohybovať presne o 15 ° pre každý impulz elektriny, ktorý motor dostane.
Konštrukčný a pracovný princíp
The konštrukcia krokového motora pomerne súvisí s a Jednosmerný motor . Obsahuje permanentný magnet ako Rotor, ktorý je v strede a bude sa otáčať, akonáhle na neho bude pôsobiť sila. Tento rotor je uzavretý cez č. statora, ktorý je navinutý cez magnetickú cievku po celom obvode. Stator je usporiadaný v blízkosti rotora, takže magnetické polia vo vnútri statorov môžu riadiť pohyb rotora.

Krokový motor
Krokový motor je možné ovládať samostatným napájaním každého statora. Takže stator bude magnetizovať a bude pracovať ako elektromagnetický pól, ktorý využíva na pohyb vpred odpudivú energiu na rotore. Alternatívne magnetizovanie, ako aj demagnetizovanie statora posúva rotor postupne a umožňuje mu vynikajúcu kontrolu.
The princíp fungovania krokového motora je elektromagnetický magnetizmus. Zahŕňa rotor vyrobený s permanentným magnetom, zatiaľ čo stator je vybavený elektromagnetmi. Akonáhle je dodávané napájanie na vinutie statora, potom sa magnetické pole rozvinie vo vnútri statora. Teraz sa rotor v motore začne pohybovať s rotujúcim magnetickým poľom statora. Toto je základný pracovný princíp tohto motora.

Konštrukcia krokového motora
V tomto motore je mäkké železo, ktoré je obklopené elektromagnetickými statormi. Póly statora a rotora nezávisia od typu krokového motora. Akonáhle sú statory tohto motora napájané, potom sa rotor bude otáčať, aby sa vyrovnal so statorom, inak sa otočí tak, aby mal stator najmenšiu medzeru. Týmto spôsobom sa statory aktivujú v sérii na otáčanie krokového motora.
Vodičské techniky
Technika riadenia krokovým motorom S niektorými špeciálnymi obvodmi je to možné kvôli ich zložitej konštrukcii. Existuje niekoľko spôsobov pohonu tohto motora, niektoré z nich sú diskutované nižšie príkladom štvorfázového krokového motora.
Jeden budiaci režim
Základnou metódou riadenia krokového motora je jediný budiaci režim. Je to stará metóda, ktorá sa v súčasnosti príliš nepoužíva, ale o tejto technike musíte vedieť. V tejto technike sa každá fáza, inak stator vedľa seba, bude spúšťať jedna po druhej, alternatívne so špeciálnym obvodom. To zmagnetizuje a odmagnetizuje stator, aby sa rotor posunul dopredu.
Celý krok jazdy
V tejto technike sa aktivujú dva statory naraz namiesto jedného vo veľmi kratšom časovom období. Výsledkom tejto techniky je vysoký krútiaci moment a umožňuje motoru poháňať vysoké zaťaženie.
Polovica kroku
Táto technika pomerne súvisí s Full Step Drive, pretože dva statory budú usporiadané vedľa seba tak, aby sa najskôr aktivovali, zatiaľ čo tretí sa aktivuje potom. Tento druh cyklu pre prvé prepnutie dvoch statorov a potom tretí stator bude poháňať motor. Výsledkom tejto techniky bude zlepšenie rozlíšenia krokového motora pri súčasnom znížení krútiaceho momentu.
Micro Stepping
Táto technika sa najčastejšie používa kvôli svojej presnosti. Premenlivý krokový prúd bude dodávať prostredníctvom obvod budiča krokového motora smerom k statorovým cievkam vo forme sínusového priebehu. Presnosť každého kroku možno zvýšiť týmto malým krokovým prúdom. Táto technika sa často používa, pretože poskytuje vysokú presnosť a do značnej miery znižuje prevádzkový hluk.
Obvod krokového motora a jeho prevádzka
Krokové motory pracujú inak ako Motory na jednosmerný prúd , ktoré sa otáčajú, keď je na ich svorky pripojené napätie. Krokové motory majú na druhej strane efektívne viaczubé elektromagnety usporiadané okolo centrálneho kusu železa v tvare ozubeného kolesa. Elektromagnety sú napájané externým riadiacim obvodom, napríklad mikrokontrolérom.

Obvod krokového motora
Aby sa hriadeľ motora otočil, je najskôr napájaný jeden elektromagnet, vďaka ktorému sú zuby prevodovky magneticky priťahované k zubom elektromagnetu. V okamihu, keď sú zuby ozubeného kolesa zarovnané s prvým elektromagnetom, sú mierne posunuté od nasledujúceho elektromagnetu. Takže keď je ďalší elektromagnet zapnutý a prvý je vypnutý, ozubené koleso sa mierne otočí, aby sa vyrovnalo s nasledujúcim elektromagnetom, a odtiaľ sa postup opakuje. Každá z týchto miernych rotácií sa nazýva krok, pričom celý počet krokov vedie k úplnej rotácii.
Týmto spôsobom je možné motor presne vytočiť. Krokový motor sa netočí nepretržite, otáča sa po krokoch. K dispozícii sú 4 cievky s 90alebouhol medzi sebou upevnený na statore. Pripojenia krokového motora sú určené spôsobom vzájomného prepojenia cievok. V krokovom motore nie sú cievky spojené. Motor má 90alebokrok otáčania, pričom cievky sú napájané v cyklickom poradí, pričom sa určuje smer otáčania hriadeľa.
Fungovanie tohto motora je znázornené stlačením spínača. Cievky sa aktivujú sériovo v 1-sekundových intervaloch. Hriadeľ sa otáča o 90 °alebozakaždým, keď sa aktivuje ďalšia cievka. Jeho krútiaci moment pri nízkych otáčkach sa bude meniť priamo podľa prúdu.
Typy krokových motorov
Existujú tri hlavné typy krokových motorov, sú:
- Stepper s permanentným magnetom
- Hybridný synchrónny stepper
- Variabilný krokový odpor
Krokový motor s permanentným magnetom
Motory s permanentnými magnetmi používajú permanentný magnet (PM) v rotore a pôsobia na príťažlivosť alebo odpudzovanie medzi rotorom PM a statorovými elektromagnetmi.
Toto je najbežnejší typ krokového motora v porovnaní s rôznymi typmi krokových motorov dostupných na trhu. Tento motor obsahuje v konštrukcii motora permanentné magnety. Tento druh motora je tiež známy ako motor z plechovky / plechovky. Hlavnou výhodou tohto krokového motora sú nižšie výrobné náklady. Pre každú revolúciu má 48 - 24 krokov.
Krokový motor s variabilnou neochotou
Motory s variabilnou reluktanciou (VR) majú rotor z obyčajného železa a fungujú na princípe, že minimálna reluktancia sa vyskytuje s minimálnou medzerou, preto sú body rotora priťahované k pólom statorového magnetu.
Variabilná neochota krokového motora je základným typom motora a používa sa posledných niekoľko rokov. Ako už názov napovedá, uhlová poloha rotora závisí hlavne od neochoty magnetického obvodu, ktorý sa môže vytvoriť medzi zubami statora aj rotora.
Hybridný synchrónny krokový motor
Hybridné krokové motory sú pomenované preto, lebo na dosiahnutie maximálneho výkonu v malých veľkostiach balenia používajú kombináciu techník permanentného magnetu (PM) a variabilnej reluktancie (VR).
Najobľúbenejším typom motora je hybridný krokový motor pretože poskytuje dobrý výkon v porovnaní s rotorom s permanentným magnetom, pokiaľ ide o rýchlosť, rozlíšenie kroku a zadržovací moment. Ale tento typ krokového motora je drahý v porovnaní s krokovými motormi s permanentnými magnetmi. Tento motor kombinuje vlastnosti krokových motorov s permanentným magnetom aj s variabilnou reluktanciou. Tieto motory sa používajú tam, kde je potrebný menší uhol kroku, ako je 1,5, 1,8 a 2,5 stupňa.
Ako zvoliť krokový motor?
Pred výberom krokového motora pre vašu požiadavku je veľmi dôležité preskúmať krivku krútiaceho momentu a rýchlosti motora. Tieto informácie teda poskytuje projektant motora a ide o grafický symbol krútiaceho momentu motora pri zadaných otáčkach. Krivka krútiaceho momentu a rýchlosti motora by mala úzko zodpovedať potrebám aplikácie, inak nie je možné dosiahnuť očakávaný výkon systému.
Typy zapojenia
Krokové motory sú zvyčajne dvojfázové motory ako unipolárne, inak bipolárne. Pre každú fázu v unipolárnom motore sú dve vinutia. Tu je stredový závit obyčajný, ktorý vedie medzi dvoma vinutiami smerom k pólu. Unipolárny motor má 5 až 8 prívodov.
V konštrukcii, kde je spoločný z dvoch pólov rozdelený bez ohľadu na stred, má tento krokový motor šesť prívodov. Ak sú dvojpólové stredové odbočky vo vnútri krátke, potom tento motor obsahuje päť prívodov. Unipolárny s 8 elektródami uľahčí sériové aj paralelné pripojenie, zatiaľ čo motor s piatimi alebo šiestimi elektródami má sériové pripojenie statorovej cievky. Činnosť unipolárneho motora môže byť zjednodušená, pretože pri ich prevádzke nie je požiadavka na obrátenie toku prúdu v budiacom okruhu, ktoré sú známe ako bifilárne motory.
V bipolárnom krokovom motore je pre každý pól jediné vinutie. Je potrebné zmeniť smer napájania cez budiaci obvod, aby sa stal zložitým, takže sa tieto motory nazývajú unifilárne motory.
Ovládanie krokového motora striedaním hodinových impulzov
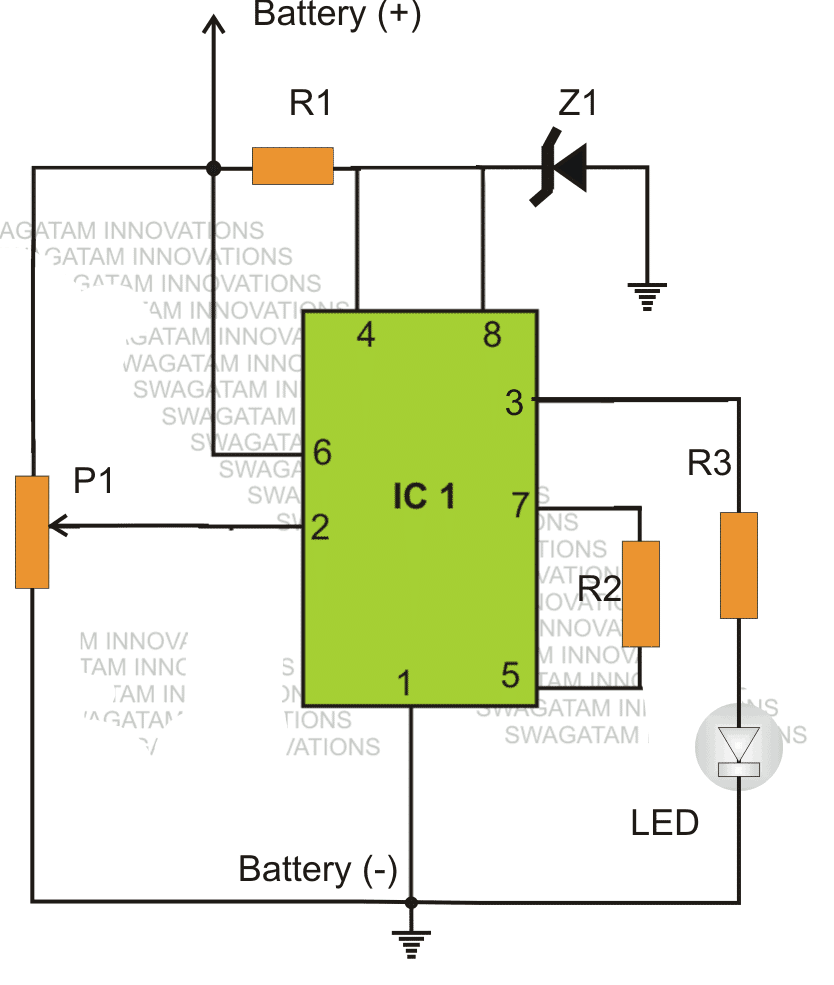
Ovládanie krokovým motorom obvod je jednoduchý a lacný obvod, ktorý sa používa hlavne v aplikáciách s nízkym výkonom. Obvod je znázornený na obrázku, ktorý pozostáva z 555 časovačov IC ako stabilného multivibrátora. Frekvencia sa počíta pomocou daného vzťahu.
Frekvencia = 1 / T = 1,45 / (RA + 2RB) C, kde RA = RB = R2 = R3 = 4,7 kiloohmu a C = C2 = 100 uF.

Ovládanie krokového motora striedaním hodinových impulzov
Výstup časovača sa používa ako hodiny pre dva 7474 duálne klopné obvody „D“ (U4 a U3) nakonfigurované ako počítadlo zvonenia. Keď je napájanie na začiatku zapnuté, nastaví sa iba prvý klopný obvod (tj. Výstup Q na kolíku 5 U3 bude v logike „1“) a ďalšie tri klopné obvody sa resetujú (tj. Výstup Q je v logike 0). Po prijatí hodinového impulzu sa logický výstup „1“ prvého klopného obvodu prevedie na druhý klopný obvod (pin 9 na U3).
Takže výstup logiky 1 sa neustále posúva kruhovo s každým hodinovým impulzom. Q výstupy všetkých štyroch klopných obvodov sú zosilnené tranzistorovými zostavami Darlingtonových tónov vo vnútri ULN2003 (U2) a sú pripojené k vinutiam krokového motora oranžovo, hnedo, žlto, čierno na 16, 15,14, 13 podľa ULN2003 a červené na + som dodávka.
Spoločný bod vinutia je pripojený k zdroju + 12V DC, ktorý je tiež pripojený k pólu 9 ULN2003. Farebný kód použitý pre vinutie sa môže líšiť od značky po značku. Keď je napájanie zapnuté, riadiaci signál pripojený k pinu SET prvého klopného obvodu a pinom CLR ostatných troch klopných obvodov je aktívny „nízky“ (z dôvodu obvodu zapnutia / vypnutia vytvoreného obvodom R1 -C1) na nastavenie prvého klopného obvodu a vynulovanie zvyšných troch klopných obvodov.
Po resetovaní bude Q1 na IC3 „vysoký“, zatiaľ čo všetky ostatné Q výstupy budú „nízky“. Externý reset je možné aktivovať stlačením resetovacieho spínača. Stlačením resetovacieho spínača môžete zastaviť krokový motor. Uvoľnením resetovacieho spínača sa motor opäť začne otáčať v rovnakom smere.
Rozdiel medzi krokovým motorom a servomotorom
Servomotory sú vhodné pre aplikácie s vysokým krútiacim momentom a otáčkami, zatiaľ čo krokový motor je lacnejší, takže sa používajú tam, kde je potrebný vysoký prevádzkový krútiaci moment, zrýchlenie s nízkym a stredným tlakom, prevádzková flexibilita otvoreného inak uzavretého okruhu. Rozdiel medzi krokovým motorom a servomotorom zahŕňa nasledujúce.
| Krokový motor | Servo motor |
| Motor, ktorý sa pohybuje v samostatných krokoch, je známy ako krokový motor. | Servomotor je jeden druh motora s uzavretou slučkou, ktorý je pripojený k kódovaču, aby poskytoval spätnú väzbu a polohu otáčok.
|
| Krokový motor sa používa tam, kde je hlavnou prioritou kontrola a presnosť | Servomotor sa používa tam, kde je hlavná priorita rýchlosť
|
| Celkový počet pólov krokového motora sa pohybuje od 50 do 100 | Celkový počet pólov servomotora sa pohybuje od 4 do 12 |
| V systéme s uzavretou slučkou sa tieto motory pohybujú s konštantným impulzom | Tieto motory potrebujú kódovač na zmenu impulzov na riadenie polohy.
|
| Krútiaci moment je vysoký pri menšej rýchlosti | Krútiaci moment je pri vysokej rýchlosti nízky |
| Poloha je rýchlejšia pri krátkych úderoch | Čas umiestnenia je rýchlejší pri dlhých úderoch |
| Vysokotolerančný pohyb zotrvačnosti | Pohyb zotrvačnosti s nízkou toleranciou |
| Tento motor je vhodný pre mechanizmy s nízkou tuhosťou, ako sú remenice a remene | Nie je vhodné pre mechanizmus s menšou tuhosťou |
| Schopnosť reagovať je vysoká | Schopnosť reagovať je nízka |
| Používajú sa na kolísanie zaťaženia | Nepoužívajú sa na kolísanie zaťaženia |
| Úprava zosilnenia / ladenia nie je potrebná | Je potrebná úprava zosilnenia / ladenia |
Krokový motor vs jednosmerný motor
Krokové aj jednosmerné motory sa používajú v rôznych priemyselných aplikáciách, ale hlavné rozdiely medzi týmito dvoma motormi sú trochu mätúce. Tu uvádzame niektoré spoločné znaky medzi týmito dvoma vzormi. Každá charakteristika je uvedená nižšie.
Charakteristiky | Krokový motor | Jednosmerný motor |
| Kontrolné charakteristiky | Jednoduché a využíva mikrokontrolér | Jednoduché a nie sú potrebné žiadne doplnky |
| Rozsah rýchlostí | Nízke od 200 do 2 000 otáčok za minútu | Mierna |
| Spoľahlivosť | Vysoký | Mierna |
| Účinnosť | Nízka | Vysoký |
| Charakteristiky krútiaceho momentu alebo rýchlosti | Najvyšší krútiaci moment pri menších rýchlostiach | Vysoký krútiaci moment pri menších rýchlostiach |
| Náklady | Nízka | Nízka |
Parametre krokového motora
Parametre krokového motora zahŕňajú hlavne uhol kroku, kroky pre každú otáčku, kroky pre každú sekundu a otáčky za minútu.
Krokový uhol
Krokový uhol krokového motora možno definovať ako uhol, o ktorý sa rotor motora otočí, akonáhle sa na vstup statora dostane jeden impulz. Rozlíšenie motora je možné definovať ako počet krokov motora a počet otáčok rotora.
Rozlíšenie = počet krokov / počet otáčok rotora
O usporiadaní motora sa dá rozhodnúť prostredníctvom stupňovitého uhla a je vyjadrený v stupňoch. Rozlíšenie motora (číslo kroku) je č. krokov, ktoré sa uskutočnia v rámci jednej otáčky rotora. Keď je krokový uhol motora malý, potom je rozlíšenie pre usporiadanie tohto motora vysoké.
Presnosť usporiadania objektov prostredníctvom tohto motora závisí hlavne od rozlíšenia. Akonáhle je rozlíšenie vysoké, potom bude presnosť nízka.
Niektoré motory s presnosťou môžu vytvoriť 1 000 krokov v rámci jednej otáčky vrátane 0,36 stupňa stupňovitého uhla. Typický motor obsahuje 1,8 stupňa uhla kroku s 200 krokmi pre každú otáčku. Rôzne uhly krokov, napríklad 15 stupňov, 45 stupňov a 90 stupňov, sú u bežných motorov veľmi bežné. Počet uhlov sa môže meniť z dvoch na šesť a malý krokový uhol sa dá dosiahnuť pomocou štrbinových pólových častí.
Kroky pre každú revolúciu
Kroky pre každé rozlíšenie je možné definovať ako počet uhlov krokov potrebných pre celkovú revolúciu. Vzorec pre toto je 360 ° / krokový uhol.
Kroky za každú sekundu
Tento druh parametra sa používa hlavne na meranie počtu krokov prejdených za každú sekundu.
Revolúcia za minútu
Otáčky sú otáčky za minútu. Používa sa na meranie frekvencie otáčania. Takže pomocou tohto parametra môžeme vypočítať počet otáčok za jednu minútu. Hlavný vzťah medzi parametrami krokového motora je nasledovný.
Kroky za každú sekundu = počet otáčok za minútu x počet krokov za otáčku / 60
Prepojenie krokových motorov s mikrokontrolérom 8051
Prepojenie krokového motora s 8051 je veľmi jednoduché pomocou troch režimov, ako je vlnový pohon, plný krokový pohon a polovičný krokový pohon, tým, že sa 0 a 1 pridelia štyrom vodičom motora na základe toho, aký režim pohonu musíme pre spustenie tohto motora zvoliť.
Zvyšné dva vodiče musia byť pripojené k zdroju napätia. Tu sa používa unipolárny krokový motor, kde sú štyri konce cievok spojené s primárnymi štyrmi pinmi portu-2 v mikrokontroléri pomocou ULN2003A.
Tento mikrokontrolér nedodáva dostatočný prúd na pohon cievok, takže súčasný ovládač IC má rád ULN2003A. Musí sa použiť ULN2003A a je to kolekcia 7 párov tranzistorov NPN Darlington. Návrh Darlingtonovho páru je možné vykonať pomocou dvoch bipolárnych tranzistorov, ktoré sú spojené na dosiahnutie maximálneho prúdového zosilnenia.
V ovládači IC ULN2003A sú vstupné piny 7, výstupné piny 7, kde dva piny slúžia na napájanie a uzemnenie. Tu sa používajú 4 vstupné a 4 výstupné piny. Ako alternatíva k ULN2003A sa L293D IC používa aj na zosilnenie prúdu.
Musíte pozorovať dva bežné vodiče a štyri cievkové vodiče veľmi opatrne, inak sa krokový motor neotočí. To možno pozorovať pri meraní odporu pomocou multimetra, ale multimetr nebude zobrazovať žiadne údaje medzi dvoma fázami vodičov. Akonáhle je spoločný vodič a ďalšie dva vodiče v rovnakej fáze, musí vykazovať podobný odpor, zatiaľ čo cieľové body dvoch cievok v podobnej fáze preukážu dvojnásobný odpor v porovnaní s odporom medzi spoločným bodom a jedným koncovým bodom.
Riešenie problémov
- Riešením problému je proces kontroly stavu motora, či motor pracuje alebo nie. Nasledujúci kontrolný zoznam sa používa na riešenie problémov s krokovým motorom.
- Najskôr overte pripojenia a kód obvodu.
- Ak je to v poriadku, potom skontrolujte, či je motor napájaný správnym napätím, alebo že iba vibruje, ale netočí sa.
- Ak je napájanie správne, potom overte koncové body štyroch cievok, ktoré sú spojené s IC ULN2003A.
- Najskôr nájdite dva všeobecné koncové body a pripevnite ich na napájanie 12 V, potom zafixujte zvyšné štyri vodiče na IC ULN2003A. Kým sa nespustí krokový motor, vyskúšajte všetky možné kombinácie. Ak to nie je správne, potom bude tento motor vibrovať namiesto otáčania.
Môžu krokové motory bežať nepretržite?
Spravidla všetky motory bežia alebo sa otáčajú nepretržite, ale väčšina z nich sa nemôže zastaviť, keď sú napájané. Keď sa pokúsite obmedziť hriadeľ motora, keď je pod prúdom, bude horieť alebo sa zlomí.
Alternatívne sú krokové motory navrhnuté tak, aby vytvárali diskrétny krok, potom tam opäť počkajte, krok a zostaňte tam. Ak chceme dosiahnuť, aby motor zostal na jednom mieste kratší čas, než znova vykročí, bude to vyzerať ako nepretržité otáčanie. Spotreba energie týchto motorov je vysoká, ale k rozptýleniu výkonu dochádza hlavne po zastavení alebo nesprávnej konštrukcii motora, potom existuje šanca na prehriatie. Z tohto dôvodu sa prúdový prísun motora často znižuje, keď je motor v dlhodobejšej pozdržanej polohe.
Hlavným dôvodom je, že akonáhle sa motor otáča, jeho vstupná elektrická časť sa môže zmeniť na mechanickú. Keď sa motor zastaví, keď sa točí, potom sa môže všetok príkon zmeniť na teplo vo vnútri cievky.
Výhody
The výhody krokového motora zahrňte nasledujúce.
- Robustnosť
- Jednoduchá konštrukcia
- Môže pracovať v riadiacom systéme s otvorenou slučkou
- Údržba je nízka
- Funguje to v každej situácii
- Spoľahlivosť je vysoká
- Uhol natočenia motora je úmerný vstupnému impulzu.
- Motor má pri zastavení plný krútiaci moment.
- Presné umiestnenie a opakovateľnosť pohybu, pretože dobré krokové motory majú presnosť 3 - 5% kroku a táto chyba nie je kumulatívna z jedného kroku na druhý.
- Vynikajúca reakcia na naštartovanie, zastavenie a cúvanie.
- Veľmi spoľahlivé, pretože v motore nie sú žiadne kontaktné kefy. Preto životnosť motora jednoducho závisí od životnosti ložiska.
- Odozva motora na digitálne vstupné impulzy poskytuje riadenie v otvorenej slučke, vďaka čomu je riadenie motora jednoduchšie a lacnejšie.
- Je možné dosiahnuť synchrónne otáčanie s veľmi nízkou rýchlosťou so záťažou, ktorá je priamo spojená s hriadeľom.
- Je možné realizovať široký rozsah otáčok, pretože rýchlosť je úmerná frekvencii vstupných impulzov.
Nevýhody
The nevýhody krokového motora zahrňte nasledujúce.
- Účinnosť je nízka
- Krútiaci moment motora bude rýchlo klesať s rýchlosťou
- Presnosť je nízka
- Spätná väzba sa nepoužíva na špecifikáciu potenciálnych zmeškaných krokov
- Malý krútiaci moment smerom k zotrvačnému pomeru
- Mimoriadne hlučný
- Ak motor nie je správne riadený, môžu sa vyskytnúť rezonancie
- Prevádzka tohto motora nie je ľahká pri veľmi vysokých otáčkach.
- Je potrebný vyhradený riadiaci obvod
- V porovnaní s jednosmernými motormi spotrebúva viac prúdu
Aplikácie
The aplikácie krokového motora zahrňte nasledujúce.
- Priemyselné stroje - Krokové motory sa používajú v automobilových meradlách a automatizovaných výrobných zariadeniach obrábacích strojov.
- Bezpečnosť - nové produkty sledovania pre bezpečnostný priemysel.
- Lekárske - Krokové motory sa používajú vo vnútri lekárskych skenerov, vzorkovačov a nachádzajú sa tiež vo vnútri digitálnej dentálnej fotografie, fluidných púmp, respirátorov a prístrojov na analýzu krvi.
- Spotrebná elektronika - Krokové motory v kamerách pre automatické funkcie zaostrenia a zväčšenia digitálneho fotoaparátu.
A tiež mať aplikácie pre obchodné stroje a aplikácie pre počítačové periférie.
Toto je teda všetko o prehľad krokového motora ako konštrukcia, princíp práce, rozdiely, výhody, nevýhody a jej aplikácie. Teraz máte predstavu o druhoch supermotorov a ich aplikáciách, ak máte akékoľvek otázky týkajúce sa tejto témy alebo elektrických a elektronické projekty zanechať komentáre nižšie.
Fotografický kredit
- Krokový motor od MST







{kind=link}