
WSG-DSA je uchopovací prst, ktorý integruje hmatové snímanie pre spätnú väzbu profilu s vysokým rozlíšením počas uchopenia. Na účely snímania používa inteligentný hmatový menič DSA9205i. Pasuje na hornú časť základných čeľustí WSG a je priamo prepojený s ovládačom uchopovača cez integrovaný port snímača v základných čeľustiach, takže nie sú potrebné žiadne externé komponenty a káble, aby bolo možné zahrnúť hmatové zariadenie do vašich manipulačných aplikácií. Tieto typy snímačov prstov boli detekované automaticky a parametrizované WSG. Tlakový profil je možné použiť z vnútornej strany ovládača uchopovača pomocou výkonného skriptovacieho rozhrania. Tento článok pojednáva o druhoch hmatu senzory a ich fungovanie .
Čo je to hmatový senzor?
Hmatový senzor je zariadenie. Meria prichádzajúce informácie v reakcii na fyzickú interakciu s prostredím. Pocit dotyku u ľudí sa všeobecne modeluje, to znamená kožný zmysel a kinestetický zmysel. Kožný dotyk je schopný detekovať stimuly vyplývajúce z mechanickej stimulácie, bolesti a teploty. Kinestetický dotyk prijíma vstupy snímača z receptorov vo vnútri svalov, šliach a kĺbov.

Hmatový senzor
Typy hmatových senzorov
Ďalej sú uvedené rôzne typy hmatových senzorov
- Senzor sily / krútiaceho momentu
- Dynamický snímač
- Tepelný senzor
Senzor sily / krútiaceho momentu
Senzory sily / krútiaceho momentu sa používajú v kombinácii s hmatovým poľom na poskytnutie informácií pre riadenie sily. Títo typy snímačov dokáže snímať záťaž kdekoľvek, ako je distálny článok manipulátora, a v obmedzeniach ako snímač kože. Kožný snímač spravidla poskytuje presnejšie meranie sily pri vyšších šírkach pásma. Ak je prepojenie manipulátora definované všeobecne a predpokladá sa kontakt signálneho bodu, potom snímač sily / krútiaceho momentu môže poskytnúť informácie o kontaktnom mieste sily a momentov - nazýva sa to vnútorné hmatové snímanie. Obrázok snímača krútiaceho momentu je uvedený nižšie.

Senzor sily alebo krútiaceho momentu
Dynamický senzor
Dynamické snímače sú menšie akcelerometre na prúžkoch prstov alebo na koži robotického prsta. Všeobecná funkcia ako Pacinianove telieska u ľudí má rovnako veľké príslušné polia, takže akcelerometer jednej alebo dvoch koží je postačujúci pre celý prst. Tieto snímače účinne detekujú vznik a prerušenie kontaktu, vibrácie spojené s kĺzaním po textúrovaných povrchoch.

Dynamický senzor
Snímač frekvencie stresu je druhým typom dynamického dotykového snímača. Ak konček prsta kĺže rýchlosťou niekoľkých centimetrov / s na celom povrchu malé hrčky alebo jamky, stali sa dôležité dočasné zmeny na pokožke. Piezoelektrický polymér, ako je PVDF, vytvára náboj v reakcii na poškodenie, ktoré je možné aplikovať na výrobu prúdu, ktorý je priamo úmerný rozsahu zmeny.
Tepelný senzor
Tepelné snímače sú dôležité pre ľudskú schopnosť identifikovať materiály vyrobených predmetov, ale niektoré sa používajú aj v robotike. Tepelné snímanie zahŕňa detekciu tepelných gradientov v pokožke, ktoré zodpovedajú ako teplote, tak aj tepelnej vodivosti objektu. Robotické tepelné snímače sú zapojené do Peltierových križovatiek v kombinácii s termistory .

Tepelný senzor
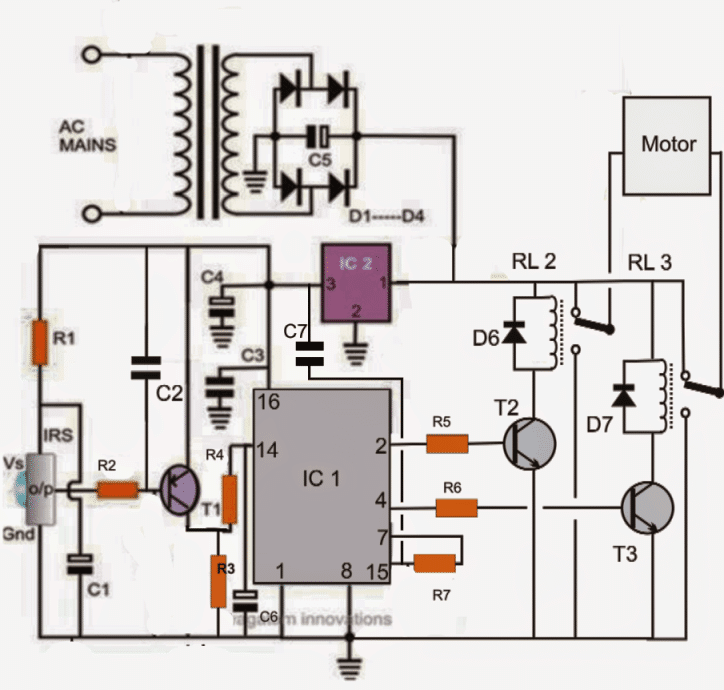
Princíp činnosti a schéma zapojenia hmatového snímača
Hmatové snímače sú vyvinuté tak, aby poskytovali hmatové snímacie schopnosti pre tele-prevádzkových manipulátorov a inteligentných robotov. Hmatové snímače dokážu identifikovať normálnu silu pôsobiacu na hmatové pixely na hypnotizáciu riadenia sily a hmatových snímok a na generovanie rozpoznávania objektov. Avšak na získanie hmatových obrázkov a normálnych síl sú informácie tangenciálne rozhodujúce pre kontrolu sily a prevenciu skĺznutia, čo je hypnotizujúce pre úspešnosť úlohy - preto sú potrebné trojrozmerné hmatové snímače.

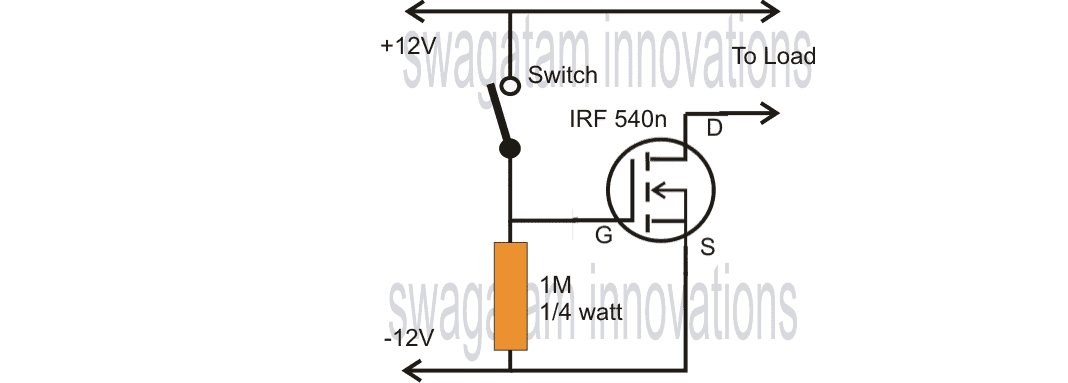
Schéma zapojenia hmatového senzora
Existuje niekoľko trojrozmerných hmatových senzorov vyvinutých pomocou piezorezistívnych, kapacitných a voliteľných snímacích prvkov a tieto hmatové senzory sú vyrobené Technológia MEMS . Integrované snímacie prvky a obvody predspracovania slúžia na kompaktnosť, ale sú príliš slabé a ľahko sa rozbijú pre väčšinu aplikácií. Napríklad rozsah sily hmatového snímača je iba 0,01 N w4x a ostatné hmatové snímače nie sú poskytované technológiou MEMS. Nasledujúca schéma zapojenia zobrazuje obvod hmatového senzora.
Hmatový senzor v robotike
Hmatový senzor, ktorý sa používa v robotoch NASA, je uvedený nižšie
- Jeden z príkladov priamo spojených s prieskumom planét.
- NASA používa tieto senzory na medzinárodnej vesmírnej stanici na pomoc ľuďom pri opravách / údržbe v životnom prostredí
- NASA vyskúšala veľa hmatových senzorov v robotike, ktoré sú v počiatočnej fáze. Použili Rezistor snímajúci silu a teraz sa používajú kompozity na kvantové tunelovanie
- Viacnásobné zaťažovacie tlačidlá a bunky sa v praxi využívajú na vývoj hmatových senzorov, ktoré vyrába priemyselný robot
Aplikácie hmatových senzorov
Dotknite sa aplikácie senzorov sa používajú v
- robotické
- Počítačový hardvér
- Bezpečnostný systém
- Dotyková obrazovka zariadenia na mobilnom telefóne
- Výpočtový
Výhody hmatového senzora
Výhody hmatového senzora sú uvedené nižšie:
- Ponúkajú ľahko použiteľné riešenia hmatových senzorov
- Hmatový senzor nemá žiadne externé komponenty a káble
- Kompaktná extrakcia
- Overená technológia hmatového snímania z robotiky.
Jedná sa o princíp fungovania a aplikácií hmatového senzora. Dúfame, že uvedené informácie pomôžu pri poskytovaní dobrých informácií a porozumení projektu. Ďalej, ak máte akékoľvek otázky týkajúce sa tohto konceptu na serveri elektrické a elektronické projekty , môžete komentovať v nasledujúcej sekcii. Je tu pre vás otázka - aké sú funkcie hmatových senzorov?
Fotografické úvery:
- Hmatový senzor štvorcový priestor
- Senzor sily / krútiaceho momentu transducertechniques
- Dynamický senzor vernier
- Tepelný senzor obrazy-amazon





![Zostavte jednoduchý obvod konvertora Buck [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)

{kind=link}
{kind=link}
{kind=link}