Elektrický stroj, ktorý premieňa elektrickú energiu na mechanickú energiu sa nazýva elektrický motor. Najdôležitejším elektromotorom je jednoduché elektrostatické zariadenie, ktoré vytvoril škótsky mních Andrew Gordon v 40. rokoch 17. storočia. Ale v roku 1821 Michael Faraday predviedol premenu elektrickej energie na mechanickú.
Elektrické motory sú primárne rozdelené do dvoch kategórií: trojfázové motory a Jednosmerné motory . Každá kategória je opäť rozdelená do mnohých typov. Mnoho spotrebičov, ako sú mixéry, brúsky, ventilátory atď., Najčastejšie používané domáce spotrebiče, v ktorých nájdeme rôzne typy motorov a ktoré môžu byť prevádzkované pri rôznych rýchlostiach s reguláciou otáčok motorov. V tomto článku sa budeme zaoberať jedným z hlavných typov jednosmerných motorov, menovite Krokový motor a jeho riadenie pomocou mikrokontroléra.
Krokový motor
Synchrónny a bezkartáčový jednosmerný motor ktorý prevádza elektrické impulzy na mechanické pohyby, a preto sa otáča postupne s určitým uhlom medzi jednotlivými krokmi na dokončenie úplnej rotácie, sa nazýva krokový motor. Uhol medzi krokmi otáčania krokového motora sa nazýva krokový uhol motora.

Krokový motor
Krokové motory sú podľa vinutia rozdelené do dvoch typov: Unipolárne krokové motory a bipolárne krokové motory. Unipolárny krokový motor sa často používa v mnohých aplikáciách kvôli jeho ľahkej obsluhe v porovnaní s bipolárnym krokovým motorom. Existujú ale rôzne typy krokových motorov, ako je krokový motor s permanentným magnetom, krokový motor s variabilnou odporom a hybridný krokový motor.
Ovládanie krokového motora
Krokový motor je možné ovládať rôznymi technikami, ale tu diskutujeme o ovládaní krokového motora pomocou Mikrokontrolér Atmega . 89C51 je mikrokontrolér systému Rodina mikrokontrolérov 8051 .

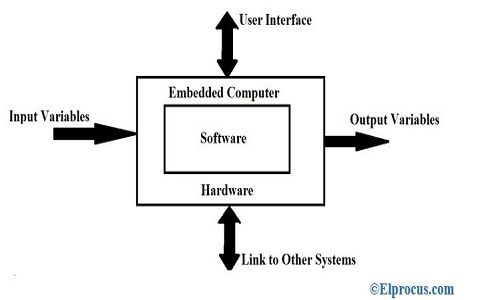
Bloková schéma riadenia krokovým motorom
Bloková schéma riadenia krokového motora pomocou mikrokontroléra 8051 je znázornená na obrázku s Zdroj , mikrokontrolér, krokový motor a bloky ovládacích spínačov.
2 metódy na návrh ovládacieho obvodu krokového motora
Je navrhnutý ovládač krokového motora pomocou 8051 mikrokontrolérov a spínací obvod na riadenie rýchlosti krokového motora. Obvod ovládacieho spínača je možné navrhnúť pomocou tranzistorové spínače alebo použitím radiča krokových motorov IC ako ULN2003 namiesto tranzistorov.
1. Ovládací obvod pomocou integrovaného obvodu ovládača krokového motora
Unipolárny krokový motor je možné otáčať postupným napájaním statorových cievok. Poradie týchto napäťových signálov vedených cez cievky motora alebo vodiče je dostatočné na pohon motora, a preto nie je potrebný žiadny obvod vodiča na riadenie smeru prúdu v statorových cievkach.

Ovládanie krokového motora pomocou IC
Dvojfázový krokový motor sa skladá zo štyroch koncových vodičov pripojených k cievkam a dvoch bežných vodičov pripojených k dvom koncovým vodičom, ktoré tvoria dve fázy. Spoločné body a koncové body dvoch fáz sú pripojené k zemi alebo k pólom Vcc a mikrokontroléru. Na otáčanie motora musia byť koncové body dvoch fáz napájané. Primárne sa napätie privádza do prvého koncového bodu fázy1 a ďalšie napätie sa privádza do prvého koncového bodu fázy2 atď.
Krokový motor je možné prevádzkovať v rôznych režimoch, ako je krokový režim Wave Drive, krokový režim s úplným pohonom a krokový režim s polovičným náhonom.
Režim krokovania Wave Drive
Opakovaním vyššie uvedeného sledu je možné motor otáčať v krokovom režime vlnového pohonu buď v smere hodinových ručičiek alebo proti smeru hodinových ručičiek na základe výberu koncových bodov. Nasledujúca tabuľka zobrazuje postupnosť fáz signálu pre režim krokovania vlnového pohonu.


Režim krokovania Wave Drive
Režim krokovania na plný pohon
Energiou dvoch koncových bodov rôznych fáz sa súčasne dosiahne režim krokovania na plný pohon. Tabuľka zobrazuje postupnosť fáz signálu v režime krokovania na plný pohon.


Režim krokovania na plný pohon
Režim krokovania polovičnej jazdy
Kombináciou krokov vlny a režimov krokovania na plný pohon sa dosahuje režim krokovania na polovičný pohon. V tomto režime je teda krokovací uhol rozdelený na polovicu. Tabuľka zobrazuje postupnosť fáz signálu v režime krokovania polovičného pohonu.


Režim krokovania polovičnej jazdy
Krokový uhol vo všeobecnosti závisí od rozlíšenia krokového motora. Veľkosť krokov a smer otáčania sú priamo úmerné počtu a poradiu vstupnej sekvencie. Rýchlosť otáčania hriadeľa závisí od frekvencie vstupnej postupnosti. Krútiaci moment a počet magnetov súčasne zmagnetizovaných sú proporcionálne.
Krokový motor vyžaduje prúd 60 mA, ale maximálny prúdový prúd mikrokontroléra Atmega AT89C51 je 50 mA. Regulátor krokového motora IC sa teda používa na prepojenie krokového motora s mikrokontrolérom na prenos signálov.
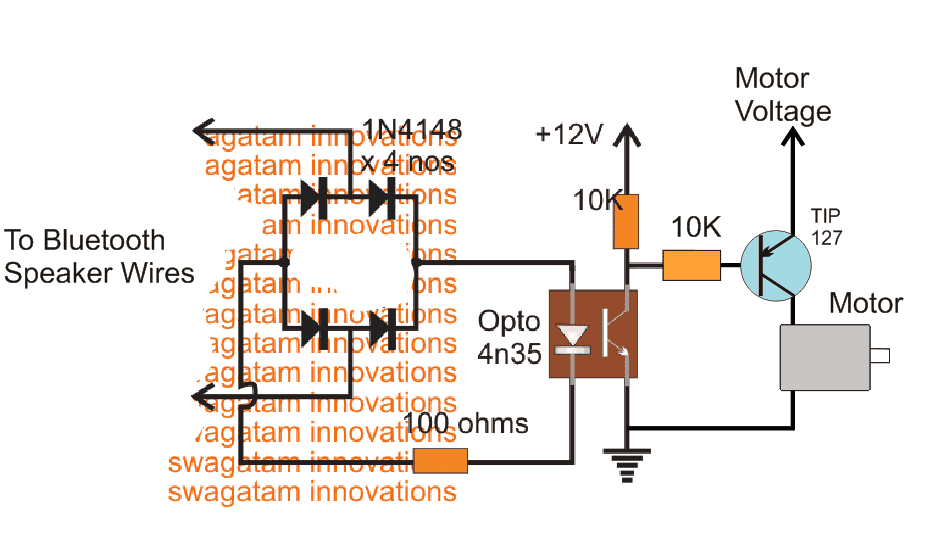
2. Ovládací obvod spínača pomocou tranzistorov
Napájanie obvodu môže byť napájané znížením napätia z 230 V na 7,5 V pomocou zostupného transformátora a potom usmernenie mostíkovým usmerňovačom s diódami . Tento usmernený výstup je privádzaný do filtračného kondenzátora a potom vedený cez regulátor napätia. Regulovaný výstup 5 V sa získava z regulátora napätia. Resetovací pin9 je pripojený medzi kondenzátor a odpor.

Ovládací obvod krokového motora pomocou tranzistora
Krokový motor sa spravidla skladá zo štyroch cievok, ako je to znázornené na obrázku. Na pohon motora sú teda potrebné štyri obvody vodič-vodič. Namiesto použitia ovládača IC krokového motora na pohon motora sú ako tranzistorové obvody pripojené štyri tranzistory na 21, 22, 23 a 24 vývodoch mikrokontroléra.
Ak tranzistory začnú viesť, potom sa okolo cievky vytvorí magnetické pole, ktoré spôsobí rotáciu motora. Otáčky krokového motora sú priamo úmerné frekvencii vstupných impulzov. Krištáľový oscilátor je pripojený k pinom 18 a 19, aby poskytoval taktovaciu frekvenciu mikrokontroléra okolo 11,019 MHz.
Čas vykonania ľubovoľnej inštrukcie možno vypočítať pomocou nasledujúceho vzorca
Čas = (((C * 12)) / f
Kde C = číslo cyklu
A F = kryštálová frekvencia
Jeden z aplikačných obvodov, ktorý využíva krokový motor na otáčanie solárneho panelu, je popísaný nižšie.
Ovládanie krokového motora pomocou programovaného mikrokontroléra 8051
Projekt solárneho panelu sledovania slnka je určený na generovanie maximálneho množstva energie automatickým nastavením solárneho panelu. V tomto projekte je krokový motor riadený programovaným mikrokontrolérom rodiny 8051 prepojený so solárnym panelom, aby sa udržala tvár solárnych panelov vždy kolmo na slnko.

Ovládanie krokového motora pomocou mikrokontroléra od Edgefxkits.com
The naprogramovaný mikrokontrolér generuje v pravidelných intervaloch stupňovité elektrické impulzy do krokového motora na otáčanie solárneho panelu. Ovládač IC sa používa na pohon krokového motora, pretože radič nedokáže zabezpečiť energetické požiadavky motora.
Zanechajte svoje návrhy, spätnú väzbu a dotazy uverejnením komentárov v sekcii komentárov nižšie. Urobíme všetko pre to, aby sme vám technicky pomohli ohľadom tohto článku a rozvoj elektrických a elektronických projektov pomocou krokového motora.