Úvod do robotov
Robot je stroj, ktorý vyzerá ako človek. To bolo naprogramované tak, aby urobilo niečo. Slovo Robot pochádza zo slovanského slova robota (čo znamená nútený robotník). Robot bol vyvinutý v 60. rokoch 20. storočia. Roboty sú vyrobené z kovov a sú miešačom ďalších prvkov. Roboti jednoducho velia a to, čo hovoria ľudia. Pred tridsiatimi rokmi boli roboti niečo vo vedecko-fantastickom filme. Ale dnes sa robotika používa v mnohých oblastiach. A to je pre budúcnosť ľudstva veľmi dôležité. The robotické technológie sa zdokonaľujú v pomoci pri obrane štátu, zdravotnej starostlivosti, výrobe, vnútornej bezpečnosti, vzdelávaní, spotrebnom tovare a mnohých rôznych odvetviach. Už lekári používajú robotiku v špeciálnych chirurgických zákrokoch. Roboti sú dôležití, pretože vykonávajú úlohy, ktoré sú pre človeka nebezpečné a nemožné.
5 dôvodov, prečo sú roboty populárne
- Rýchlosť
- Nebezpečné prostredie
- Opakované úlohy
- Účinnosť
- Presnosť
Rýchlosť:
Môžu sa použiť roboty, pretože sú pri vykonávaní úloh rýchlejší ako ľudia. Robot je skutočne mechanizmus, ktorý je riadený počítačom. Vieme, že počítače dokážu veľmi rýchlo vypočítať a spracovať údaje v porovnaní s ľuďmi. Niektorí roboti sa skutočne pohybujú rýchlejšie, než napríklad ľudia, rýchlejšie vykonajú úlohu, napríklad zdvihnú a vložia predmety.
Nebezpečné prostredia:
Roboty môžu byť použité v nebezpečnom prostredí, pretože môžu pracovať na miestach, kde by mohol byť ohrozený človek. Napríklad robot môže byť navrhnutý tak, aby vydržal väčšie množstvo tepla, žiarenia, chemických výparov, ako by dokázali ľudia.
Opakované úlohy:
Roboty niekedy nie sú skutočne oveľa rýchlejšie ako ľudia, ale sú schopní jednoducho robiť stále tú istú prácu. To je pre robota ľahké, pretože akonáhle je robot naprogramovaný tak, aby vykonal úlohu raz, môže rovnaký program spustiť viackrát, aby vykonal danú úlohu viackrát. A robot sa nebude nudiť tak, ako by to robil človek.
Účinnosť:
Efektivita spočíva v plnení úloh bez zbytočného plytvania. To znamená
- Nestrácajte čas
- Neplytvanie materiálmi
- Nestrácať energiu
Presnosť:
Presnosť spočíva v tom, aby ste úlohy vykonávali veľmi presne. V továrni na výrobu položiek musí byť každá položka vyrobená rovnako. Keď sa montujú predmety, robot dokáže umiestniť diely do zlomku milimetra.
Ovládanie robota
Základný robot alebo robotický systém sa skladá z tuhého tela, v ktorom je uložený celý obvod robota. Obvody pozostávajú zo senzorov, ktoré snímajú akékoľvek zmeny v prostredí a dodávajú tieto informácie do riadiacej jednotky.
Na základe vstupu zo senzorov riadi riadiaca jednotka zodpovedajúcim spôsobom akčné členy. Hlavná operácia robota teda spočíva na riadiacej jednotke. V niektorých aplikáciách je robot úplne automatický, to znamená, že riadenie leží v samotnom prístroji a na základe niektorých snímacích jednotiek sú akčné členy automaticky ovládané riadiacou jednotkou. V niektorých aplikáciách sa robot ovláda manuálne.
Pozrime sa na dva spôsoby manuálneho ovládania robota
- Používanie mobilného telefónu
- Pomocou diaľkového ovládania televízora
Robotické vozidlo riadené mobilným telefónom:
Keď hovoríme o bezdrôtové robotické vozidlá , všeobecne myslíme na RF technologické obvody. Ale tento projekt je veľmi odlišný. Na riadenie pohybu robotického vozidla používa mobilný telefón. Tu sme použili technológiu DTMF na ovládanie robotického vozidla pomocou mobilného telefónu. Použili sme dva mobilné telefóny, jeden je pripojený k robotovi a druhý je telefón používateľa. Medzi týmito dvoma mobilnými telefónmi je nadviazaná komunikácia a po stlačení ľubovoľného klávesu je tento tón počuť na druhý koniec bunky. Tento tón sa nazýva „dvojtónový viacfrekvenčný“ tón (DTMF).

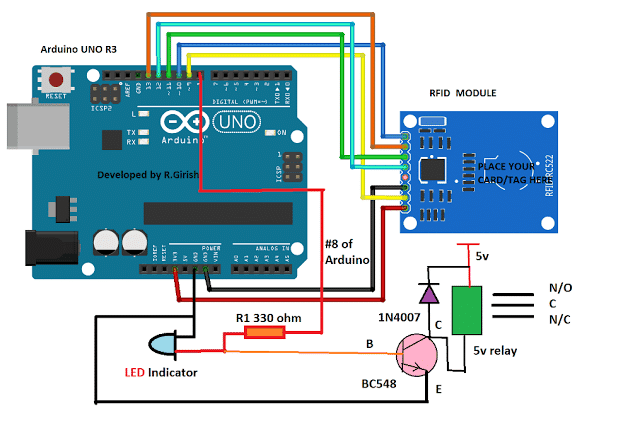
Robotické vozidlo riadené mobilným telefónom

Schéma zapojenia robotického vozidla riadeného mobilným telefónom
Tento projekt je zameraný na vývoj a robotické vozidlo ktorý je ovládaný mobilným telefónom. Toto je založené na mikrokontroléri 8051. Dva mobilné telefóny ovládajú robota podľa požiadaviek. Jeden mobilný telefón je spojený s robotom a druhý je používateľská bunka. Keď kláves stlačený na mobilnom telefóne používateľa vygeneruje zodpovedajúci tón, prijme sa v inej bunke. Prijatý tón spracuje mikrokontrolér pomocou dekodéra DTMF. Dekodér dekóduje DTMF tón na binárne číslice a tieto binárne kódované údaje sa odošlú do mikrokontroléra. Na základe vstupu z mobilného telefónu dáva mikrokontrolér príslušnému vodičovi motora správne signály na otáčanie každého z motorov v požadovanom smere. Napríklad po stlačení konkrétneho čísla na mobilnom telefóne používateľa sa hovor automaticky vytočí na systémový mobilný telefón. Systémový mobilný telefón je pripojený k dekodéru DTMF, ktorý zodpovedajúcim spôsobom dekóduje tón, a motor sa otáča v smere zodpovedajúcom stlačenému číslu.
IR riadené robotické vozidlo:
V tomto systéme je hlavne robotické vozidlo ovládané diaľkovým ovládačom televízora. Infračervený (IR) snímač je prepojený s riadiacou jednotkou robota na snímanie diaľkového signálu. Tieto informácie sa odovzdávajú riadiacej jednotke, ktorá pohybuje robotom podľa požiadavky. Ako riadiaci systém sa používa mikrokontrolér.
V tomto infračervenom diaľkovom ovládaní funguje ako vysielač. V okamihu, keď je na diaľkovom ovládaní stlačené tlačidlo, bude signál prechádzať a získavať IR prijímač. Tento znak sa odošle do mikrokontroléra, ktorý dekóduje signál a vykoná príslušný pohyb podľa stlačeného tlačidla na diaľkovom ovládači. Napríklad ak na diaľkovom ovládači stlačíte číslo 1, robot bude podľa našich požiadaviek otočený doľava. Test ostatných záväzkov (dopredu, dozadu a doprava) sa vykoná porovnateľným spôsobom s využitím IR. Na prijímacom konci je vývoj dosiahnutý dvoma motormi, ktoré sú prepojené s mikrokontrolérom.
Program je napísaný, to znamená, že počas vykonávania odosiela príkazy do ovládača IC IC podľa jeho požiadavky na chod motora pre pohyb robota, ako je vysvetlené vyššie.

IR riadené blokové schéma robotického vozidla
Ak máte pochybnosti týkajúce sa tohto článku, zanechajte prosím komentár. A dajte mi vedieť viac aplikácií a metód s tým súvisiacich?