

Priemyselná automatizácia a riadenie
V dnešnej dobe priemyselné automatizačné systémy sa stali populárnymi v mnohých priemyselných odvetviach a hrajú rozhodujúcu úlohu pri kontrole niekoľkých operácií súvisiacich s procesmi. Vďaka implementácii širokej škály priemyselných sietí s ich geografickým rozložením v továrni alebo priemysle sa možnosti prenosu a riadenia základných dát stali sofistikovanejšími a ľahšími od riadenia na nízkej úrovni až po vysokú úroveň. Tieto priemyselné siete sú smerované cez rôzne prevádzkové zbernice, ktoré používajú rôzne komunikačné štandardy ako protokol CAN, Profibus, Modbus, sieť zariadení atď. Pozrime sa teda, ako funguje komunikácia CAN na automatizáciu priemyselných odvetví a ďalších systémy založené na automatizácii .
Úvod do priemyselnej automatizácie a riadenia
Na nasledujúcom obrázku je znázornená architektúra priemyselnej automatizácie a riadenia, pri ktorej sa pre automatizáciu celého systému vykonávajú tri úrovne riadenia. Tieto tri úrovne sú riadenie a automatizácia, riadenie procesov a riadenie vyššieho rádu. Úroveň riadenia a automatizácie pozostáva z rôznych poľných zariadení, ako sú snímače a akčné členy, ktoré monitorujú a riadia procesné premenné.

Architektúra priemyselnej automatizácie
Process Control Level je centrálny ovládač zodpovedný za riadenie a údržbu niekoľkých riadiacich zariadení, ako je Programovateľné logické kontroléry (PLC) a tiež používateľské grafické rozhrania ako SCADA a Rozhranie človek - stroj (HMI) sú tiež zahrnuté v tejto úrovni. Vyššia úroveň kontroly objednávok je podniková úroveň, ktorá riadi všetky obchodné operácie.
Pri dôslednom sledovaní vyššie uvedeného diagramu a jeho jednotlivých úrovní, ako aj medzi nimi, sú komunikačné zbernice ako Profibus a priemyselný Ethernet sa považujú za spojené s výmenou informácií. Preto je komunikačná zbernica hlavnou súčasťou priemyselnej automatizácie pre spoľahlivý prenos údajov medzi riadiacimi jednotkami, počítačmi a tiež z prevádzkových prístrojov.
Sieť riadenej oblasti alebo protokol CAN

Model prepojenia otvorených systémov (OSI)
Dátová komunikácia je prenos údajov z jedného bodu do druhého. Na podporu priemyselnej komunikácie vyvinula Medzinárodná organizácia pre normalizáciu model Open Systems Interconnection (OSI) na zabezpečenie prenosu údajov medzi rôznymi uzlami. Tento protokol a rámec OSI závisí od výrobcu. Protokol CAN používa nižšie dve vrstvy, t. J. Fyzické a dátové spojovacie vrstvy zo siedmich vrstiev modelu OSI.
Sieť Controller Area Network alebo CAN je multi-master sériová komunikačná zbernica , a je to sieť nezávislých kontrolórov. Aktuálna verzia CAN sa používa od roku 1990 a vyvinuli ju spoločnosti Bosch a Intel. Vysiela správy do uzlov prezentovaných v sieti a ponúka prenosovú rýchlosť až 1 Mb / s. Pre efektívny prenos sa riadi spoľahlivými metódami detekcie chýb - a pri arbitráži o prioritách správ a detekcii kolízií používa protokol viacnásobného prístupu s prenosovým prenosom. Kvôli týmto spoľahlivým charakteristikám prenosu dát sa tento protokol používal v autobusoch, automobiloch a iných automobilových systémoch, priemyselnej a priemyselnej automatizácii, banských aplikáciách atď.
Prenos dát CAN
Protokol CAN nie je protokol založený na adresách, ale protokol orientovaný na správy, pričom vložená správa v CAN má obsah a prioritu prenášaných údajov. Až do prijatia údajov na zbernici sa každý uzol rozhodne, či údaje zahodí alebo spracuje - a potom je sieťová správa v závislosti od systému určená do jedného uzla alebo do mnohých ďalších uzlov. Komunikácia CAN umožňuje konkrétnemu uzlu vyžiadať si informácie od ktoréhokoľvek iného uzla zaslaním RTR (žiadosť o vzdialený prenos).

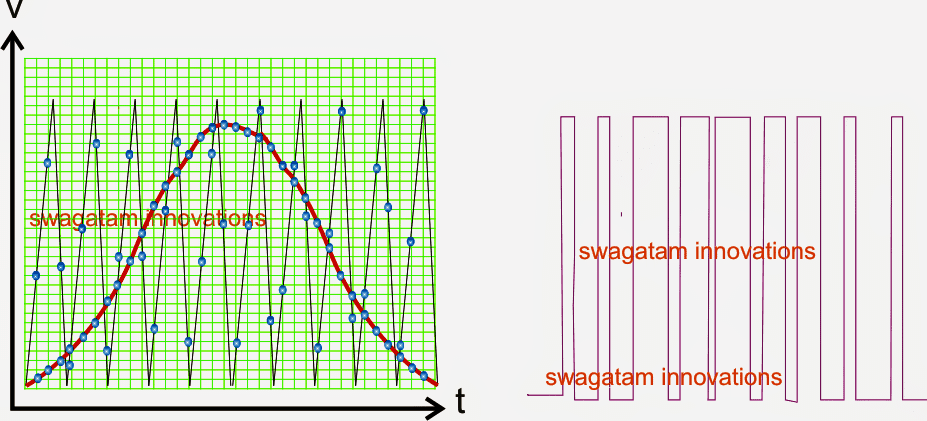
Prenos údajov protokolom CAN
Ponúka automatický prenos dát bez arbitráže prenosom správy s najvyššou prioritou a zálohovaním a čakaním na správu s nižšou prioritou. V tomto protokole je dominantou logická 0 a recesívna logická 1. Keď jeden uzol prenáša recesívny bit a druhý prenáša dominujúci bit, potom dominantný bit vyhráva. Arbitrážna schéma založená na prioritách rozhoduje o tom, či bude udelené povolenie na pokračovanie v prenose, ak začnú vysielať súčasne dve alebo viac zariadení.
Rám správy CAN
Komunikačnú sieť CAN je možné nakonfigurovať na rôzne formáty rámcov alebo správ.
- Štandardný alebo základný formát rámu alebo CAN 2.0 A
- Extended Frame Format alebo CAN 2.0 B

Štandardný alebo základný formát rámu alebo CAN 2.0 A
Rozdiel medzi týmito dvoma formátmi spočíva v tom, že dĺžka bitov, tj. Základný rámec podporuje identifikátor v dĺžke 11 bitov, zatiaľ čo rozšírený rámec podporuje identifikátor v dĺžke 29 bitov, ktorý je tvorený 18-bitovým rozšírením a 11-bitový identifikátor. Bit IDE sa líši formátom rozšíreného rámca CAN a formátom základného rámca CAN, pričom IDE sa prenáša ako dominantné v prípade 11-bitového rámca a recesívne v prípade 29-bitového rámca. Je tiež možné odosielať alebo prijímať správy vo formáte základného rámca niektorými radičmi CAN, ktoré podporujú formáty rozšíreného rámca.

Extended Frame Format alebo CAN 2.0 B
Protokol CAN má štyri typy rámcov: dátový rámec, vzdialený rámec, chybový rámec a rámec preťaženia. Dátový rámec obsahuje dátový rámec prenosového uzla vzdialený rámec požaduje špecifický rámec chyby prenosu identifikátora, ktorý detekuje chyby uzla, a preťažovací rámec sa aktivuje, keď systém vloží oneskorenie medzi dátami alebo vzdialeným rámcom. Komunikácia CAN môže teoreticky prepojiť až 2032 zariadení v jednej sieti, ale kvôli hardvérovým vysielačom / prijímačom je prakticky obmedzená na 110 uzlov. Podporuje kabeláž do 250 metrov s prenosovou rýchlosťou 250 kb / s s bitovou rýchlosťou 10 kb / s je maximálna dĺžka 1 km a najkratšia s rýchlosťou 1 Mb / s 40 metrov.
Priemyselná automatizácia a riadenie pomocou protokolu CAN
Toto projekt je realizovaný na kontrolu priemyselných záťaže, ktoré sú prevádzkované jednosmerným motorom na základe teplotných zmien procesu. Rôzne systémy riadenia procesov sú závislé od teploty. Predpokladajme, že v prípade nádrže s miešadlom - po dosiahnutí určitej teploty - musí byť na otáčanie miešadla zapnutý jednosmerný motor. Tento projekt to teda dosahuje použitím protokolu CAN, ktorý predstavuje vysoko efektívnu a spoľahlivú nízkonákladovú komunikáciu.
V tomto projekte sa používajú dva mikrokontroléry, jeden na získavanie údajov o teplote a druhý na riadenie jednosmerného motora . CAN Controller MCP2515 a CAN transceiver MCP2551 sú pripojené k obom mikrokontrolérom na implementáciu CAN komunikácie pre výmenu dát.

Priemyselná automatizácia a riadenie pomocou protokolu CAN
Vysielací bočný mikrokontrolér pomocou LM35 nepretržite monitoruje teploty teplotný senzor prevodom analógových hodnôt na digitálne s pripojeným ADC. Tieto hodnoty sa porovnajú s nastavenými hodnotami naprogramovanými v mikrokontroléri a tieto hodnoty sa porušia, keď mikrokontrolér odošle alebo prenáša údaje do prijímača bočný mikrokontrolér jednotkami CAN radiča a transceiveru.
Komunikácia CAN na prijímacej strane prijíma údaje a prenáša ich do mikrokontroléra, ktorý ich ďalej spracováva a riadi jednosmerný motor pomocou integrovaného obvodu vodiča. Je tiež možné zmeniť smer motora pomocou IC vodiča ovládaného mikrokontrolérom.
Protokol CAN teda umožňuje komunikáciu typu peer-to-peer pripojením rôznych uzlov v priemyselnom prostredí. Tento typ komunikácie sa dá implementovať aj do iných automatizačné systémy ako dom alebo budova , továreň atď. Dúfame, že vám tento článok mohol poskytnúť lepšie pochopenie priemyselnej automatizácie pomocou komunikácie CAN. Prosím, napíšte nám pre ďalšie informácie a otázky.
Fotografické úvery:
- Priemyselná automatizácia a riadenie podľa záblesk
- Architektúra priemyselnej automatizácie od siemens
- Model prepojenia otvorených systémov (OSI) podľa jesť
- Prenos údajov protokolom CAN do môže-cia
- Štandardný alebo základný formát rámu alebo CAN 2,0 A podľa technologyuk
- Extended Frame Format alebo CAN 2.0 B by širokopásmové pripojenie









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}