Tento príspevok podrobne popisuje základnú prevádzkovú koncepciu jednosmerných motorov, ktoré sa tiež nazývajú BLDC.
Rozdiel medzi kartáčovanými a bezkartáčovými jednosmernými motormi
V našich tradičných kartáčovaných motoroch sa kefy používajú na prepínanie centrálneho pohybujúceho sa rotora vzhľadom na stator permanentného magnetu v okolí stacionárneho zariadenia.
Kefy sa stávajú nevyhnutnými, pretože rotor sa vyrába pomocou elektromagnetov, ktoré na svoju činnosť potrebujú napájanie, ale pretože tiež potrebuje otáčať, veci sa stávajú neohrabanými a kefy sa stávajú jedinou alternatívou na napájanie rotujúceho elektromagnetického rotora.
Naopak v jednosmerných motoroch alebo motoroch BLDC máme jednosmerný centrálny stator a okolitý kruhový rotor. Stator je tvorený súborom elektromagnetov, zatiaľ čo rotor má permanentné magnety pripevnené po jeho obvode v určitých vypočítaných polohách.
Používanie senzorov Hall Effect
Mechanizmus má tiež snímač s Hallovým efektom, ktorý je nainštalovaný s cieľom snímať polohu rotora a jeho magnetov vzhľadom na elektromagnet statora a informovať údaje o externom spínacom obvode, ktorý potom zodpovedá za aktiváciu / deaktiváciu elektromagnetov na správne poradie alebo načasovanie ovplyvňujúce rotačný pohyb na rotore.
Vyššie uvedené vysvetlenie možno pochopiť pomocou nasledujúcej základnej ilustrácie a potom prostredníctvom zložitého návrhu v nasledujúcich obrázkoch.

Dozvedeli sme sa a vedeli sme niekoľko zaujímavých vecí o magnetoch a o tom, ako tieto zariadenia interagujú.
Vieme, že severný pól magnetu priťahuje južný pól iného magnetu, zatiaľ čo podobné póly odpudzujú.
Ako sú umiestnené permanentné magnety
Na vyššie uvedenom diagrame vidíme disk s vloženým magnetom na jeho okraji (zobrazeným červenou farbou), ktorý je umiestnený severným pólom smerom von, a tiež elektromagnet umiestnený v rovnobežnej blízkosti s kruhovým okrajom disku, ktorý vytvára južné magnetické pole, keď je napájané.
Teraz za predpokladu, že je usporiadanie umiestnené tak, ako je to znázornené na prvom hornom diagrame, s elektromagnetom v deaktivovanom stave.
V tejto polohe, akonáhle je elektromagnet aktivovaný s príslušným jednosmerným vstupom, dosiahne a vytvorí južné magnetické pole ovplyvňujúce ťahovú silu nad magnetom disku, ktoré následne núti disk rotovať s určitým krútiacim momentom, kým sa jeho permanentný magnet nedostane do súladu s elektromagnetov opačných línií toku.
Vyššie uvedená akcia ukazuje základný formát, v ktorom koncept BLDC funguje.
Ako pracuje motor BLDC so snímačmi Hall Effect
Teraz sa pozrime, ako sa vyššie uvedená koncepcia implementuje pomocou senzorov Hallovho efektu, aby sa udržal nepretržitý pohyb nad rotorom.
Nasledujúci príkladový diagram vysvetľuje mechanizmus komplexne:

Na vyššie uvedenom diagrame v zásade vidíme priame usporiadanie rotora / statora BLDC, kde vonkajším kruhovým prvkom je rotujúci rotor, zatiaľ čo centrálny elektromagnet sa stáva pevným statorom.
Bolo vidieť, že rotor má na obvode pripevnených niekoľko permanentných magnetov, ktoré majú južný pól ako ovplyvňujúce línie toku, centrálny stator je silný elektromagnet, ktorý je navrhnutý tak, aby generoval ekvivalentnú silu magnetického toku severného pólu, keď je napájaný externý DC.
Môžeme tiež vizualizovať Hallov senzor umiestnený v blízkosti jedného z rohov vnútorného obvodu rotora. Hallov jav zásadným spôsobom sníma magnetické pole rotujúceho rotora a dodáva signál do riadiaceho obvodu zodpovedného za napájanie statorových elektromagnetov.
Pokiaľ ide o hornú polohu, vidíme prázdnu oblasť (bez magnetického poľa) rotora v tesnom kontakte s Hallovým snímačom, ktorý ho udržiava vo vypnutom stave.
V tomto okamihu signál vypnutia z Hallovho efektu informuje riadiaci obvod o zapnutí elektromagnetov, čo okamžite vyvolá ťahový efekt na južný pól rotora stojaci tesne za rohom.
Keď sa to stane, južný pól zostupuje a vytvára požadovaný krútiaci moment na rotore a snaží sa vyrovnať v súlade so severným pólom elektromagnetu.
V tomto procese sa však južný pól rotora tiež priťahuje blízko k Hallovmu senzoru (ako je znázornené na spodnom diagrame), ktorý to okamžite zistí a zapne informovanie riadiaceho obvodu o vypnutí elektromagnetov.
Čas vypnutia elektromagnetov je rozhodujúci
Vypnutie elektromagnetov v správnom okamihu, ako to signalizuje snímač Hallovho efektu, zakazuje zastavenie a obmedzenie pohybu rotora, skôr mu umožňuje pokračovať v pohybe generovaným krútiacim momentom, kým sa nezačne formovať predchádzajúca poloha a kým sa hala Senzor opäť „pocíti“ prázdnu oblasť rotora a vypne sa opakovaním cyklu.
Vyššie uvedené prepínanie Hallovho snímača podľa rôznych polôh rotora spôsobuje nepretržitý rotačný pohyb s toque, ktorý môže byť priamo úmerný magnetickým interakciám stator / rotor, a samozrejme, že sa umiestňuje Hallov efekt.
Vyššie uvedená diskusia vysvetľuje najzásadnejší mechanizmus s dvoma magnetmi, jedným Hallovým senzorom.
Aby sa dosiahli výnimočne vyššie krútiace momenty, v iných bezuhlíkových motoroch s vyššou účinnosťou sa používa viac magnetov a súprav elektromagnetov, v ktorých je možné vidieť viac ako jeden snímač s Hallovým javom na uskutočnenie viacnásobného snímania magnetov rotora tak, aby bolo možné prepínať rôzne súpravy elektromagnetov na preferovaná správna postupnosť.
Ako ovládať motor BLDC
Doteraz sme pochopili základný pracovný koncept BLDC motory a dozvedeli sme sa, ako sa Hallov senzor používa na aktiváciu elektromagnetu motora cez externý pripojený elektronický obvod na udržanie nepretržitého rotačného pohybu rotora, v ďalšej časti sa budeme venovať štúdiu toho, ako obvod ovládača BLDC skutočne funguje na riadenie motorov BLDC
Metóda implementácie pevného statorového elektromagnetu a rotujúceho voľného magnetického rotora zaisťuje zvýšenú účinnosť motorov BLDC v porovnaní s tradičnými kartáčovanými motormi, ktoré majú presne opačnú topológiu, a preto pre svoje činnosti vyžadujú kefy. Vďaka použitiu štetcov sú postupy relatívne neefektívne z hľadiska dlhej životnosti, spotreby a rozmerov.
Nevýhoda BLDC motora
Aj keď typy BLDC môžu byť najefektívnejším konceptom motora, má jednu významnú nevýhodu, že na jeho fungovanie je potrebný externý elektronický obvod. S príchodom moderných integrovaných obvodov a citlivých Hallových senzorov sa však tento problém zdá byť v porovnaní s vysokým stupňom účinnosti spojeným s týmto konceptom dosť triviálny.
4 Magnet BLDC Driver Dizajn
V tomto článku diskutujeme jednoduchý a základný riadiaci obvod pre motor BLDC so štyrmi magnetmi a jedným Hallovým snímačom. Prevádzku motora je možné pochopiť podľa nasledujúcej schémy mechanizmu motora:

Obrázok vyššie zobrazuje základné usporiadanie motora BLDC, ktoré má dve sady permanentných magnetov po obvode vonkajšieho rotora a dve sady centrálneho elektromagnetu (A, B, C, D) ako statora.
Aby sa inicioval a udržal rotačný krútiaci moment, musia byť buď magnety A, B alebo C, D v aktivovanom stave (nikdy spolu) v závislosti od polôh severného a južného pólu magnetu rotora vzhľadom na aktivované elektromagnety.
Ako funguje ovládač motora BLDC
Aby sme boli presní, predpokladajme polohu uvedenú vo vyššie uvedenom scenári s A a B v zapnutom stave tak, že strana A je napájaná južným pólom, zatiaľ čo strana B je napájaná severným pólom.
To by znamenalo, že strana A bude pôsobiť ťahom cez svoj ľavý modrý severný pól a odpudzujúcim účinkom na svoju pravú stranu k južnému pólu statora, podobne strana B bude ťahať za dolný červený južný pól a odpudzovať horný sever potom by sa dalo predpokladať, že celý proces vyvíja pôsobivý pohyb v smere hodinových ručičiek nad mechanizmom rotora.
Predpokladajme tiež, že za vyššie uvedenej situácie je Hallov senzor v deaktivovanom stave, pretože môže ísť o Hallov senzor „aktivovaný južným pólom“.
Vyššie uvedený efekt by sa pokúsil vyrovnať a vynútiť rotor tak, aby sa juh zaistil tvárou v tvár so stranou B, zatiaľ čo severný pól so stranou A, avšak skôr ako bude táto situácia schopná preniknúť, je Hallov snímač uvedený v tesnej blízkosti posúva horný južný pól rotora, a keď práve prechádza cez Hallov senzor, je nútený sa zapnúť, vysiela pozitívny signál do pripojeného riadiaceho obvodu, ktorý okamžite reaguje a vypína elektromagnety A / B, a zapína elektromagnety C / D, uistite sa, že moment v smere hodinových ručičiek rotora je ešte raz vynútený, pričom sa udržuje konštantný krútiaci moment na rotore.
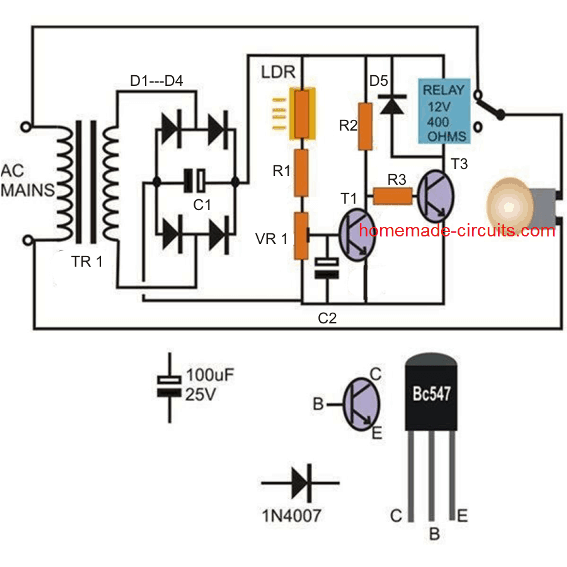
Základný obvod vodiča BLDC
Vyššie vysvetlené prepínanie elektromagnetov v reakcii na spúšťací signál Hallovho snímača je možné veľmi jednoducho implementovať pomocou nasledujúcej priamej myšlienky obvodu BLDC.

Obvod nepotrebuje veľa vysvetlenia, pretože jeho príliš základné nastavenie počas zapínania Hallovho senzora na BC547 a prepojený TIP122 je zodpovedajúcim spôsobom zapnuté, čo zase zapína zodpovedajúce sady elektromagnetov pripojených cez ich kolektor a kladné , počas období vypínania Hallovho snímača je pár BC547 / TIP122 VYPNUTÝ, ale krajný ľavý tranzistor TIP122 je ZAPNUTÝ, čím sa aktivujú opačné sady elektromagnetov.
Situácia sa prepína striedavo, nepretržite, pokiaľ zostáva napájanie, pričom sa BLDC otáča s požadovanými krútiacimi momentmi a hybnosťou.
Dvojica: Obvod nabíjačky notebooku z 12V batérie Ďalej: Ako vytvoriť výkonný obvod rušiča RF signálov