Príspevok vysvetľuje metódu, ktorú je možné pravdepodobne použiť na zvýšenie schopnosti pasívneho infračerveného senzora detekovať dokonca aj statickú alebo stacionárnu prítomnosť človeka. Táto vlastnosť nie je obvykle možná u bežných PIR senzorov.
Ako PIR detekuje ľudskú prítomnosť
Na tejto webovej stránke som už hovoril o mnohých aplikáciách detektora pohybu založených na PIR, avšak všetky tieto aplikácie vyžadujú, aby bola prítomnosť človeka neustále v pohybe, aby PIR nepretržite detekoval ich prítomnosť, čo sa javí ako veľká nevýhoda, ktorá bráni týmto jednotkám snímať neustále alebo stacionárne obsadenie ľuďmi.
Vyššie uvedená nevýhoda má však svoj dôvod. Konvenčné senzory PIR pracujú snímaním infračervených signálov z ľudského tela prostredníctvom niekoľkých paralelných slotov na ich prednej šošovke a jeho vnútorné obvody sa aktivujú iba vtedy, keď sa infračervené signály krížia medzi týmito snímacími slotmi („vízie“).
Prekročenie infračervených signálov cez snímacie sloty umožňuje obvodu PIR preložiť informácie na dva zodpovedajúce striedavé impulzy, ktoré sú zase usmernené tak, aby generovali spúšťacie napätie na výstupnom kolíku PIR.
PIR nedokáže detekovať papierenský terč
To znamená, že ak je infračervený zdroj nehybný, nevyzve modul PIR, aby vyprodukoval spúšť na výstupnom kolíku. To tiež znamená, že IR signál zo zdroja by mal nejako ďalej prechádzať cez dané sloty detekcie PIR, aby mu umožnil vnímať daného človeka v zóne.
Zdá sa, že na to neexistuje žiadny priamy alebo jednoduchý prostriedok, pretože PIR moduly sa na to nedajú vnútorne modifikovať, čo ochromuje jednotku od detekcie stacionárnej ľudskej prítomnosti.
Logické pozorovanie nám však hovorí, že ak je to rozdielny zdroj infračerveného žiarenia, ktorý môže byť potrebný na udržanie modulu PIR v činnosti, tak prečo nie prinútiť samotný PIR, aby bol v neustálom pohybe namiesto subjektu.
Koncept je možné vizualizovať z nasledujúcej simulácie GIF, ktorá zobrazuje oscilujúci PIR modul a statickú ľudskú bytosť v detekčnej zóne.

Tu vidíme, ako sa oscilujúci PIR prispôsobuje danému problému a transformuje sa, čo umožňuje detekciu aj statických IR objektov.
To je možné, pretože PIR modul svojim pohybom transformuje stacionárny infračervený zdroj na kontinuálne sa meniaci infračervený obraz naprieč dvoma prijímacími slotmi.
Aj keď táto myšlienka vyzerá zložito, v skutočnosti sa dá jednoducho vyriešiť pomocou pomalého kmitavého obvodu motora riadeného PwM.
Celý mechanizmus a podrobnosti o obvode sa dozvieme v nasledujúcich častiach.
Ako sme už diskutovali, bežné PIR moduly sú schopné detegovať iba pohybujúce sa živé objekty a nedokážu identifikovať stacionárny cieľ, ktorý obmedzuje jeho použitie iba ako detektor pohybu človeka.
Pre aplikácie, pri ktorých je v takýchto scenároch nevyhnutná detekcia obsadenosti človeka bezmotorovým pohonom, môže byť konvenčný PIR nepoužiteľný a môže vyžadovať určité externé usporiadanie pre jeho samotnú aktualizáciu.
Navrhovanie PIR na detekciu nehybných cieľov
V predchádzajúcej časti sme sa dozvedeli, že namiesto toho, aby bolo potrebné, aby bol cieľ v pohybe, je možné samotný PIR modul presúvať po danom polomere na vykonanie požadovanej detekcie statického cieľa.
V nasledujúcich častiach sa dozvedáme o jednoduchom mechanizme obvodu, ktorý je možné použiť s PIR namontovaným na malom jednosmernom motore pre navrhované oscilácie.
Ovládač motora riadený PWM / Flip Flop
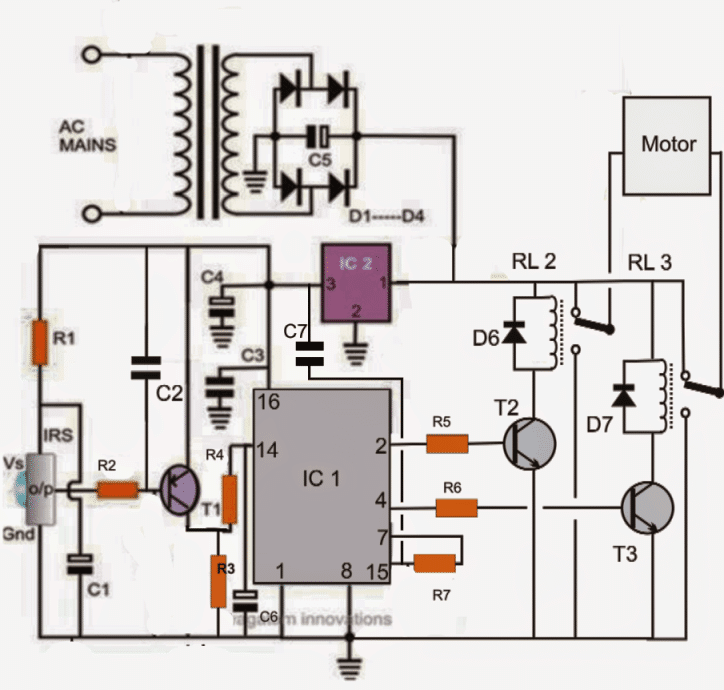
Systém v zásade vyžaduje stanovenie rýchlosti riadené PWM a prepnutie klopného obvodu pre motor. Nasledujúca schéma ukazuje, ako je možné tieto vlastnosti priradiť motoru PIR pomocou jednoduchého obvodu:

Zobrazený obvod využíva jediný IC HEF40106 hexadecimálny IC invertujúci Schmittov hradlový obvod, ktorý obsahuje 6 invertorových NOT hradiel.
Brány N1 a N2 sú nakonfigurované tak, aby produkovali nastaviteľný výstup PWM, ktorý sa privádza do brán N4, N5, N6 tvoriacich nárazníky.
Spoločný výstup z týchto vyrovnávacích hradiel je ukončený na bránu mosfetu budiča motora.
Obsah PWM sa nastavuje pomocou P1, ktorý sa nakoniec aplikuje na pripojený motor pomocou sady kontaktov relé DPDT.
Tieto reléové kontakty určujú smer pohybu motora (v smere alebo proti smeru hodinových ručičiek).
Tento klopný obvod kontaktov DPDT je riadený astabilným časovačom nakonfigurovaným okolo hradla N3, kde kondenzátor C3 / R3 určuje, akou rýchlosťou musí relé prepínať, aby umožnil motoru konzistentne meniť smer otáčania.
Vyššie uvedená konštrukcia umožňuje, aby motor vykonával požadovaný kmitavý pohyb tam a späť cez danú radiálnu zónu.
Môže sa zvoliť C3, aby sa zahájilo prepínanie po každých 5 až 6 sekundách, a PWm sa môže upraviť tak, aby umožňoval mimoriadne pomalý pohyb motora, pretože je len potrebné zabezpečiť, aby štrbiny PIR prechádzali cez IR signály cieľa v včas.
Pretože je však prevádzka motora pomalá, bude potrebné, aby výstup z PIR bol udržiavaný prostredníctvom časovača oneskorenia vypnutia, aby sa pripojená záťaž nevypínala a nezopínala, zatiaľ čo pohyb motora striedavo prerezáva infračervené vedenia od ľudského obsadenia.
Časovač oneskorenia
Nasledujúci stupeň obvod oneskorenia časovača možno použiť, ktoré zaisťuje, že zakaždým, keď výstup PIR produkuje snímaný impulz, oneskorenie časovača sa predĺži na 5 až 10 sekúnd a pripojená záťaž sa počas procesu nikdy nepreruší.

Vo vyššie uvedenom nastavení vidíme motor, ktorý prijíma napájanie z elektrického pohonu z PWM / klopného obvodu, ako je opísané v predchádzajúcom odseku.
Je možné vidieť, že vreteno motora je spojené s vodorovným hriadeľom, cez ktorý je PIR upnutý, takže keď sa motor pohybuje, PIR prechádza zodpovedajúcim spôsobom sa meniacim radiálnym pohybom tam a späť.
Zatiaľ čo sa indukuje vyššie uvedený pohyb PIR, IR signály zo stacionárneho cieľa v zóne sa detegujú vo forme krátkych striedavých impulzov, ktoré sa generujú na výstupnom kolíku PIR označenom modrým vodičom.
Tieto impulzy sa prenášajú cez kondenzátor 1 000 uF, ktorý sa nabíja každým impulzom a zaisťuje, že BC547 je udržiavaný vo vodivom režime bez prerušenia počas procesu.
Budič relé pozostávajúci zo stupňa BC557 reaguje na vyššie uvedený stabilný signál z kolektora BC547 a následne udržuje relé zapnuté, pokiaľ PIR stále detekuje prítomnosť človeka.
Zaťaženie relé tak zostáva nepretržite aktivované v dôsledku prítomnosti stojaceho človeka v oblasti.
Avšak v prípade, že je obsadené človekom alebo keď sa cieľ vzdiali od zóny, stupeň oneskorenia časovača udržuje relé a záťaž aktivované počas stanovených 5 až 10 sekúnd, po ktorých sa trvalo vypne, až kým sa zóna opäť nezachytí potenciálnym zdrojom vyžarujúcim IR.
Zoznam položiek
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100 tis
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1 uF / 100 V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST SPÍNAČ ALEBO DPDT RELÉ
- R3, C3 bude určené nejakým pokusom a omylom
AKTUALIZÁCIA:
Vyššie vysvetlený obvod PIR na detekciu statickej prítomnosti človeka je možné oveľa zjednodušiť použitím obvodu prerušovača signálu, ako je znázornené v nasledujúcej simulácii GIF:
Starostlivá kontrola ukazuje, že oscilačný pohyb nie je v skutočnosti potrebný, motor a sekacia čepeľ by sa mohli nechať voľne otáčať tak, že otáčky motora na nižšej úrovni .
Týmto by sa tiež efektívne uskutočnila zamýšľaná statická operácia snímania PIR.

Video ukážka preukazujúca statickú detekciu človeka pre PIR
Predchádzajúce: Vysvetlené 3 prepínacie obvody aktivované zvukom Ďalej: 4 jednoduché okruhy sirény, ktoré si môžete zostaviť doma