
Definícia
Bezkartáčový jednosmerný motor pozostáva z rotora vo forme permanentného magnetu a statora vo forme viacfázových vinutí kotvy. Líši sa od bežného jednosmerného motora tým, že neobsahuje kefy a komutácia sa vykonáva elektricky pomocou elektronického pohonu na napájanie vinutí statora.
BLDC motor môže byť v zásade konštruovaný dvoma spôsobmi - umiestnením rotora mimo jadro a vinutím v jadre a ďalším umiestnením vinutí mimo jadro. V prvom usporiadaní pôsobia magnety rotora ako izolátor, znižujú rýchlosť odvádzania tepla z motora a pracujú pri malom prúde. Spravidla sa používa vo ventilátoroch. V druhom usporiadaní motor odvádza viac tepla, čo spôsobuje zvýšenie jeho krútiaceho momentu. Používa sa v jednotkách pevného disku.

BLDC
Prevádzka 4-pólového 2fázového motora
Bezkartáčový jednosmerný motor je poháňaný elektronickým pohonom, ktorý pri otáčaní rotora prepína napájacie napätie medzi vinutiami statora. Poloha rotora je sledovaná prevodníkom (optickým alebo magnetickým), ktorý dodáva informácie do elektronického regulátora, a na základe tejto polohy sa určuje vinutie statora, ktoré sa má napájať. Tento elektronický pohon pozostáva z tranzistorov (2 pre každú fázu), ktoré sú ovládané mikroprocesorom.

BLDC-DC
Magnetické pole generované permanentnými magnetmi interaguje s poľom indukovaným prúdom vo vinutí statora a vytvára mechanický krútiaci moment. Elektronický spínací obvod alebo pohon prepína napájací prúd do statora tak, aby medzi interakčnými poľami udržiaval konštantný uhol 0 až 90 stupňov. Hallove snímače sú väčšinou namontované na statore alebo na rotore. Keď rotor prejde cez Hallov snímač, na základe severného alebo južného pólu generuje vysoký alebo nízky signál. Na základe kombinácie týchto signálov je definované vinutie, ktoré má byť napájané. Aby sa motor udržal v chode, magnetické pole produkované vinutiami by sa malo posúvať do polohy, keď sa rotor pohybuje, aby dohnal pole statora.

Obvod
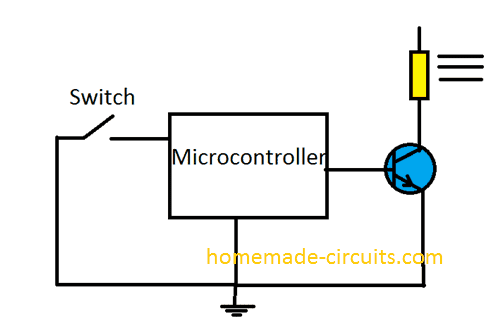
V 4-pólovom 2-fázovom jednosmernom motore s jednosmerným prúdom sa používa jeden Hallov snímač, ktorý je zabudovaný do statora. Pri otáčaní rotora sníma Hallov snímač polohu a vytvára vysoký alebo nízky signál v závislosti od pólu magnetu (sever alebo juh). Hallov senzor je pripojený cez rezistor k tranzistorom. Keď sa na výstupe zo snímača vyskytne signál vysokého napätia, začne tranzistor pripojený k cievke A viesť, čo zabezpečí cestu pre prúd a tým napája cievku A. Kondenzátor sa začne nabíjať na úplné napájacie napätie. Keď Hallov senzor detekuje zmenu polarity rotora, vytvorí na svojom výstupe signál nízkeho napätia a pretože tranzistor 1 nedostáva napájanie, je v prerušenom stave. Napätie vyvinuté okolo kondenzátora je Vcc, čo je napájacie napätie pre dvojkundtranzistor a cievka B je teraz napájaná, keď ňou prechádza prúd.
Motory BLDC majú pevné permanentné magnety, ktoré sa otáčajú, a pevnú armatúru, čím sa eliminujú problémy s pripojením prúdu k pohyblivej kotve. A možno viac pólov na rotore ako statorové alebo reluktančné motory. Posledné uvedené môžu byť bez permanentných magnetov, iba pólov, ktoré sú indukované na rotore, a potom sú zatiahnuté do usporiadania pomocou časovaných statorových vinutí. Zostava kefy / komutátora kartáčovaného jednosmerného motora nahrádza elektronický ovládač, ktorý neustále prepína fázu na vinutia, aby sa motor stále otáčal. Regulátor vykonáva komparatívne časované rozloženie výkonu pomocou polovodičového obvodu namiesto systému kefy / komutátora.

BLDC motor
7 výhod bezkartáčových jednosmerných motorov
- Lepšia rýchlosť v porovnaní s krútiacim momentom
- Vysoká dynamická odozva
- Vysoká účinnosť
- Dlhá životnosť z dôvodu nedostatku strát elektrickým prúdom a trením
- Bezhlučná prevádzka
- Vyššie rozsahy otáčok
Aplikácie:
Cena bezkartáčového jednosmerného motora klesla od jeho predstavenia z dôvodu pokroku v materiáloch a dizajne. Toto zníženie nákladov spolu s mnohými kontaktnými miestami, ktoré má nad jednosmerným motorom Brush, robí z jednosmerného jednosmerného motora obľúbený komponent v mnohých charakteristických aplikáciách. Aplikácie, ktoré používajú motor BLDC, zahŕňajú, avšak nie sú obmedzené na:
- Spotrebná elektronika
- Doprava
- Kúrenie a ventilácia
- Priemyselné inžinierstvo
- Modelové inžinierstvo
Princíp práce
Princípy fungovania motorov BLDC sú rovnaké ako pre kartáčovaný jednosmerný motor, to znamená spätná väzba polohy vnútorného hriadeľa. V prípade kartáčovaného jednosmerného motora sa spätná väzba realizuje pomocou mechanického komutátora a kief. V rámci motora BLDC sa to dosahuje pomocou viacerých snímačov spätnej väzby. V motoroch BLDC väčšinou používame Hallov snímač, kedykoľvek magnetické póly rotora prechádzajú okolo Hallovho snímača, generujú signál HIGH alebo LOW, pomocou ktorého je možné určiť polohu hriadeľa. Ak sa zmení smer magnetického poľa, obráti sa aj vyvinuté napätie.
Ovládanie BLDC motora
Riadiaca jednotka je implementovaná mikroelektronikou a má niekoľko špičkových technológií. To je možné implementovať pomocou mikrokontroléra, jednoúčelového mikrokontroléra, drôtovej mikroelektronickej jednotky, PLC alebo podobnej inej jednotky.
Analógový radič stále používa, ale nemôže spracovávať spätnoväzbové správy a zodpovedajúcim spôsobom riadiť. S týmto typom riadiacich obvodov je možné implementovať vysoko výkonné riadiace algoritmy, ako napríklad vektorové riadenie, riadenie orientované na pole, vysokorýchlostné riadenie, ktoré súvisia s elektromagnetickým stavom motora. Ďalej je konvenčne implementované riadenie vonkajšej slučky pre rôzne požiadavky na dynamiku, ako je riadenie posuvného motora, adaptívne riadenie, prediktívne riadenie ... atď.
Okrem všetkých týchto nájdeme vysoko výkonné PIC (Power Integrated Circuit), ASIC (Application Specific Integrated Circuits) ... atď. ktoré môžu výrazne zjednodušiť konštrukciu riadenia aj výkonovej elektronickej jednotky. Napríklad dnes máme kompletný PWM (Pulse Width Modulation) regulátor v jednom IC, ktorý môže v niektorých systémoch nahradiť celú riadiacu jednotku. Zložený ovládač IC môže poskytnúť úplné riešenie riadenia všetkých šiestich výkonových spínačov v trojfázovom meniči. Existuje mnoho podobných integrovaných obvodov, ktoré sa každým dňom pridávajú čoraz viac. Na konci dňa bude zostavenie systému pravdepodobne vyžadovať iba časť riadiaceho softvéru so všetkým hardvérom v správnom tvare a podobe.
Na riadenie rýchlosti motora je možné použiť vlnu PWM (Pulse Width Modulation). Tu je dané priemerné napätie alebo priemerný prúd pretekajúci motorom sa bude meniť v závislosti od času ZAPNUTIA a VYPNUTIA impulzov riadiacich rýchlosť motora, t. J. Pracovný cyklus vlny riadi jeho rýchlosť. Po zmene pracovného cyklu (čas zapnutia) môžeme zmeniť rýchlosť. Výmenou výstupných portov účinne zmení smer motora.
Kontrola rýchlosti
Regulácia otáčok BLDC motora je nevyhnutná pre to, aby motor pracoval požadovanou rýchlosťou. Otáčky jednosmerného jednosmerného motora je možné ovládať riadením vstupného jednosmerného napätia. Čím vyššie je napätie, tým vyššia je rýchlosť. Keď motor pracuje v normálnom režime alebo beží pod menovitou rýchlosťou, vstupné napätie kotvy sa zmení prostredníctvom modelu PWM. Keď je motor prevádzkovaný nad menovité otáčky, tok sa oslabuje postupujúcim vystupujúcim prúdom.
Regulácia otáčok môže byť uzavretá alebo otvorená.
Ovládanie rýchlosti otvorenej slučky - spočíva v jednoduchom ovládaní jednosmerného napätia privádzaného na svorky motora prerušením jednosmerného napätia. To však má za následok určitú formu súčasného obmedzenia.
Regulácia otáčok uzavretej slučky - Zahŕňa to kontrolu vstupného napájacieho napätia prostredníctvom spätnej väzby otáčok z motora. Napájacie napätie je tak riadené v závislosti od chybového signálu.
Regulácia rýchlosti v uzavretej slučke sa skladá z troch základných komponentov.
- Obvod PWM na generovanie požadovaných impulzov PWM. Môže to byť buď mikrokontrolér, alebo časovač IC.
- Snímacie zariadenie na snímanie skutočných otáčok motora. Môže to byť snímač s Hallovým efektom, infračervený snímač alebo optický kódovač.
- Motorový pohon na riadenie činnosti motora.
Táto technika zmeny napájacieho napätia na základe chybového signálu môže byť buď prostredníctvom techniky riadenia pid, alebo pomocou fuzzy logiky.
Aplikácia na reguláciu otáčok bezkartáčového jednosmerného motora

Ovládanie jednosmerného motora BLDC
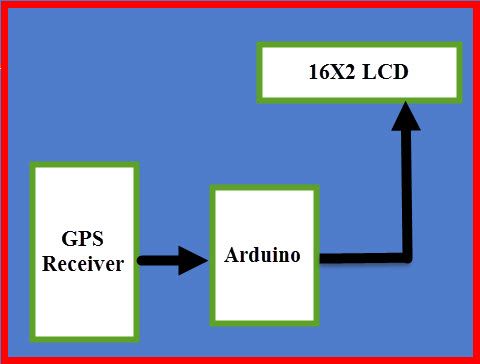
Prevádzka motora je riadená pomocou optočlenu a usporiadania MOSFET, kde je vstupný jednosmerný výkon riadený technikou PWM z mikrokontroléra. Pri otáčaní motora sa infračervená žiarovka prítomná na jeho hriadeli osvetlí bielym svetlom v dôsledku prítomnosti bielej škvrny na jeho hriadeli a odráža infračervené svetlo. Fotodióda prijíma toto infračervené svetlo a prechádza zmenou jeho odporu, čo spôsobí zmenu napájacieho napätia pripojeného tranzistora a mikrokontrolér vydá impulz na generovanie počtu otáčok za minútu. Táto rýchlosť sa zobrazuje na LCD displeji.
Požadovaná rýchlosť sa zadáva na klávesnici prepojenej s mikrokontrolérom. Rozdiel medzi snímanou rýchlosťou a požadovanou rýchlosťou je chybový signál a mikrokontrolér generuje signál PWM podľa chybového signálu na základe fuzzy logiky, ktorá dáva jednosmerný príkon motoru.
Takto pomocou riadenia v uzavretej slučke možno regulovať rýchlosť jednosmerného jednosmerného motora a je možné ho nechať otáčať ľubovoľnou požadovanou rýchlosťou.
Fotografický kredit:







{kind=link}