
Smrť je niečo, čo je nevyhnutné. Čo však s náhlou smrťou len kvôli nejakej nehode na ceste alebo ešte horšiemu - zraneniu, ktoré môže naštrbiť život človeka navždy. Nezabúda vám na chrbticu mráz po chrbte, už len pri pomyslení na to? Aký je hlavný dôvod nehôd? Samozrejme bezohľadná jazda a unáhlená jazda vozidiel najmä na hladkej ceste ako na vysokej ceste.
Podľa štatistickej správy bolo v rozpätí rokov 2005 - 2009 asi 1200 úmrtí následkom nehôd z dôvodu náhlej jazdy. A čo viac, takmer každý deň sa môžete dozvedieť správy o nehodách spôsobených vyrážkovým vodičom.
Existuje teda nejaký spôsob, ako tomu zabrániť? Samozrejme!
Môže existovať niekoľko spôsobov, ako byť dobrým vodičom a dodržiavať pravidlá cestnej premávky, udržiavať normálnu rýchlosť. Existuje však jeden dôležitý spôsob, a to udržiavať bdelosť nad rýchlosťou vozidla a podľa toho ju monitorovať.
To je možné technologicky dosiahnuť navrhnutím spôsobu kontroly rýchlosti vozidla.
2 spôsoby kontroly rýchlosti:
- Inštalácia snímačov rýchlosti na ceste alebo na stred cesty .
- Zahŕňa procesory obrazového videa : Pozostáva z kamery nainštalovanej na póloch ciest, ktorá neustále sleduje situáciu snímaním obrázkov v rýchlom slede snímok. Parametre prevádzkového toku sú analyzované a zodpovedajúcim spôsobom spracované v signálnom procesore.

Obrázok zobrazujúci sledovanie premávky videokamerou
- Začlenenie RADARU do jazdných pruhov :Na kontrolu rýchlosti vozidla je možné použiť RADAR vyslaním signálu v mikrovlnnom pásme smerom k vozidlu a analýzou posunu frekvencie odrazeného signálu. RADAR je skratka pre Radio Detection and Ranging. Vysielaný signál môže byť signál s konštantnou alebo meniacou sa frekvenciou. Normálne je CW Doppler RADAR nasadený na stĺp cesty.

Detekcia rýchlosti pomocou RADARU
- Inštalácia infračervených senzorov : Infračervené snímače s kombináciou IR LED a fotodiódy je možné použiť na sledovanie prejdenej vzdialenosti vozidla a súčasný výpočet jeho rýchlosti. Základná myšlienka spočíva v umiestnení dvojice IR LED a fotodiódy v častých intervaloch na obe strany vozovky a sledovaní prerušenia cesty medzi IR LED a fotodiódou vozidlom.
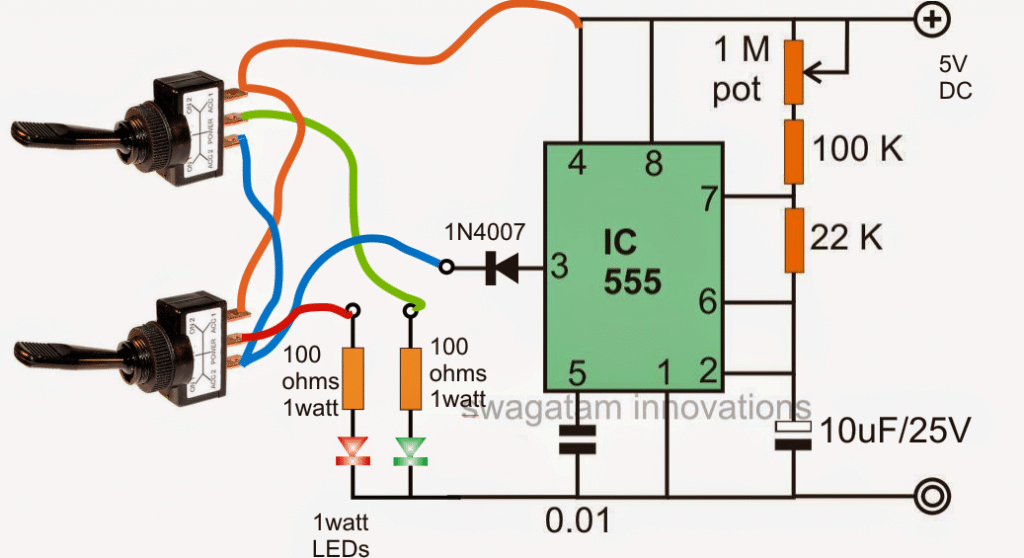
Tu je jednoduchý prototyp vyššie uvedenej metódy. Vzorový prototyp pracuje s dvoma pármi IRLED-fotodiódy.

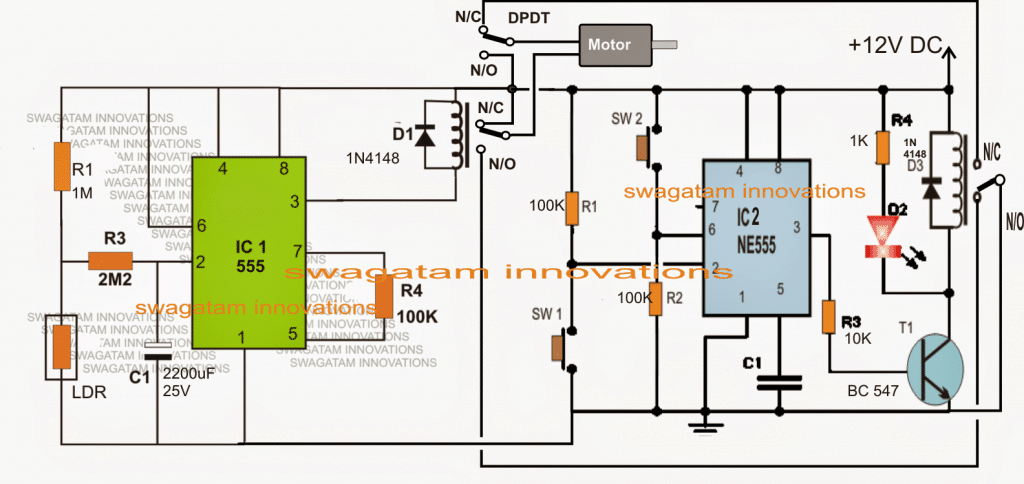
Prototypový obvod kontroly rýchlosti pomocou IR senzora od Sady Edgefx
Skladá sa z nasledujúcich častí:
- Pár fotodiódy - LED na snímanie vozidla
- Počítadlo, ktoré počíta a zobrazuje čas, ktorý vozidlo potrebuje na prekonanie cesty medzi dvoma pármi vedenými fotodiódami.
- Bzučiak, ktorý indikuje, či je rýchlosť vyššia ako nastavený limit.
- Integrované obvody časovača na zabezpečenie signálu vo vhodnom načasovaní.
- Pomocou pištole LIDAR : LIDAR je LASEROVÝ detekčný a zameriavací systém. Dopravný policajt môže mať pri sebe prenosnú pištoľ LIDAR, ktorá vysiela krátku dávku infračerveného svetla a pretože toto svetlo sa odráža späť od pohybujúceho sa vozidla, pištoľ berie do úvahy čas potrebný na odrazený signál a ten je na meranie vydelený dvomi vzdialenosť. Rýchlosť sa meria vydelením počtu vzoriek pevným časovým trvaním niekoľkých sekúnd. Funguje podobne ako systém RADAR, až na to, že namiesto rádiových vĺn používa svetelné vlny.

Zbraň LIDAR v rukách dopravného policajta
Fungovanie systému kontroly rýchlosti pomocou IR snímačov

Bloková schéma ukazujúca fungovanie systému kontroly rýchlosti pomocou IR snímačov od Sady Edgefx
Keď vozidlo prekročí cestu medzi prvým párom fotodiódy IRLED, blokuje cestu svetla a zvyšuje sa fotodiódový odpor, čo spôsobí zodpovedajúci nízky výstup signálu do časovača IC1. Časovač IC1 produkuje vysoký signál na svojom výstupe po pevne stanovenú dobu 10 ms. Za normálnych podmienok pri normálnej rýchlosti nedôjde k prerušeniu cesty medzi dvojkoundPár fotodiódy-IR LED a zodpovedajúci vstup do časovača IC2 budú vysoké, čo spôsobí nízky logický signál na jeho výstupe. Výstupy z oboch časovačov sú pripojené k bráne NAND 2 m, ktorá poskytuje vysoký výstup (pre nízke a vysoké vstupy), pripojený k vstupu časovača IC3. Zodpovedajúci výstup časovača IC je nízky, čo spôsobuje, že je bzučiak vypnutý. Súčasne je výstup z časovača IC1 daný na oba vstupy brány NAND1, čo dáva nízky logický výstup, ktorý je daný časovaču IC4, aby poskytoval vysoký logický výstup, pripojený k resetovaciemu kolíku časovača IC5. Výstup časovača IC5 je zodpovedajúcim spôsobom vysoký, čo dáva vysoký impulz do počítadla IC. Sekcia Počítadlo sa skladá zo štvorstupňového počítadla Dekády na čítanie viacerých číslic. Všetky hodiny IC počítadla sú pripojené k výstupu hodín predchádzajúceho IC čítača. Počítadlo zvyšuje svoj počet na každej stúpajúcej hrane hodinového impulzu.
Teraz predpokladajme, že sa vozidlo pohybuje takou vysokou rýchlosťou, že dosiahne cestu medzi druhým párom IRLED a fotodiódou v čase stanovenom pre časovač IC1. Takže teraz bude počítadlo ukazovať počet pod normálnym počtom a súčasne, pretože NAND brána 2 bude vysoká na oboch jeho vstupoch, jeho výstup bude nízky a zodpovedajúcim spôsobom bude časovač IC3 dostávať nízky vstup, aby získal vysoký logický výstup a podľa toho spustiť bzučiak.
Vzdialenosť medzi dvoma pármi vydelená údajom počítadla teda udáva rýchlosť vozidla a ak táto rýchlosť zvýši danú hranicu, zaznie bzučiak, ktorý dáva jasný signál o porušení rýchlostného limitu.
Podrobne som vysvetlil jeden zo spôsobov. Akékoľvek ďalšie spôsoby, ako je vítané, sú poskytované ako spätná väzba.
Fotografický kredit:
- Dopravný policajt so zbraňou LIDAR od Wikimedia










{kind=link}